

ÖCŲ„╚╦Ą─┐žųŲå¢Ņ}╩Ū┼cŲõ▀\äėīW║═äė┴”īWå¢Ņ}├▄ŪąŽÓĻPĄ─ĪŻÅ─┐žųŲė^³c┐┤Ż¼ÖCŲ„ ╚╦ŽĄĮy┤·▒Ē╚▀ėÓĄ─ĪóČÓūā┴┐║═▒Š┘|╔ŽĘŪŠĆąįĄ─┐žųŲŽĄĮyŻ¼═¼Ģrėų╩ŪÅ═ļsĄ─±Ņ║ŽäėæBŽĄĮyĪŻ ├┐éĆ┐žųŲ╚╬äš▒Š╔ĒŠ═╩Ūę╗éĆäė┴”īW╚╬äšĪŻį┌īŹļH蹊┐ųąŻ¼═∙═∙░čÖCŲ„╚╦┐žųŲŽĄĮy║å╗»×ķ╚¶Ė╔éĆĄ═ļAūėŽĄĮyüĒ├Ķ╩÷ĪŻ
ÖCŲ„╚╦┐žųŲŲ„Š▀ėąČÓĘNĮYśŗą╬╩ĮŻ¼░³└©ĘŪ╦┼Ę■┐žųŲĪó╦┼Ę■┐žųŲĪó╬╗ų├║═╦┘Č╚Ę┤ü┐žųŲĪó┴”(┴”Šž)┐žųŲĪó╗∙ė┌é„ĖąŲ„Ą─┐žųŲĪóĘŪŠĆąį┐žųŲĪóĘųĮŌ╝ė╦┘Č╚┐žųŲĪó╗¼─Ż┐žųŲĪóZā× ┐žųŲĪóūį▀mæ¬┐žųŲĪó▀fļA┐žųŲęį╝░Ė„ĘNųŪ─▄┐žųŲĄ╚ĪŻ
▒Š╣Øīóėæšō╣żśIÖCŲ„╚╦│Żė├┐žųŲŲ„Ą─╗∙▒Š┐žųŲįŁät╝░┐žųŲŲ„Ą─įOėŗå¢Ņ}ĪŻÅ─ĻP╣Ø(╗“ ▀BŚU)ĮŪČ╚┐┤Ż¼┐╔░č╣żśIÖCŲ„╚╦Ą─┐žųŲŲ„Ęų×ķå╬ĻP╣Ø(▀BŚU)┐žųŲŲ„║═ČÓĻP╣Ø(▀BŚU)┐žųŲŲ„ ā╔ĘNĪŻī”ė┌Ū░š▀Ż¼įOėŗĢræ¬┐╝æ]ĘĆæBš`▓ŅĄ─čaāöå¢Ņ}Ż╗ī”ė┌║¾š▀Ż¼ät欎╚┐╝æ]±Ņ║ŽæT┴┐ Ą─čaāöå¢Ņ}ĪŻ
ÖCŲ„╚╦Ą─┐žųŲ╚ĪøQė┌ŲõĪ░─XūėĪ▒,╝┤╠Ä└ĒŲ„Ą─čąųŲĪŻļSų°īŹļH╣żū„ŪķørĄ─▓╗═¼Ż¼┐╔ęį ▓╔ė├Ė„ĘN▓╗═¼Ą─┐žųŲĘĮ╩ĮŻ¼Å─║åå╬Ą─ŠÄ│╠ūįäė╗»ĪóąĪą═ėŗ╦ŃÖC┐žųŲĄĮ╬ó╠Ä└ĒÖC┐žųŲĄ╚ĪŻÖC Ų„╚╦┐žųŲŽĄĮyĄ─ĮYśŗę▓┐╔ęį┤¾×ķ▓╗═¼Ż¼Å─å╬╠Ä└ĒÖC┐žųŲĄĮČÓ╠Ä└ĒÖCĘųJĘų▓╝╩Į┐žųŲĪŻī”ė┌ ║¾š▀Ż¼├┐┼_╠Ä└ĒÖCł╠ąąę╗éĆųĖČ©Ą─╚╬䚯¼╗“š▀┼cÖCŲ„╚╦─│éĆ▓┐Ęų(╚ń─│éĆūįė╔Č╚╗“▌S)ų▒Įė ┬ōŽĄĪŻ▒Ē5-1▒Ē╩ŠÖCŲ„╚╦┐žųŲŽĄĮyĘųŅÉ║═Ęų╬÷Ą─ų„ę¬ĘĮĘ©ĪŻ
▒Ē5-1ÖCŲ„╚╦┐žųŲĄ─ĘųŅÉ╝░ŲõĘų╬÷ĘĮĘ©
╚╬äšĘųŅÉ Ż║░č┐žųŲĘų×ķįSČÓJę╗Ī·├┐J░³└©įSČÓ╚╬äšĪ·░č├┐éĆ╚╬äšĘų│╔įSČÓūė╚╬äš
ĮYśŗĘųŅÉŻ║ ░č╦∙ėą─▄╩®ė┌═¼ę╗ĮYśŗ▓┐╝■Ą─╚╬äšČ╝ė╔═¼ę╗╠Ä└ĒÖCüĒ╠Ä└ĒŻ¼▓ó┼cŲõ╦¹Ė„╠Ä└ĒÖCģfš{╣żū„
╗ņ║ŽĘųŅÉŻ║ īŹļH╔Ž▓óĘŪ░č╦∙ėą╚╬äšČ╝╩®ė┌╦∙ėąĄ─▓┐╝■ĪŻį┌╔Ž╩÷ā╔ĘNĘųŅÉų«ķgŻ¼═∙═∙ėąĮ╗Ą³
╚ń╣¹ę¬Į╠ÖCŲ„╚╦╚źūźŲ╣ż╝■ A, ─Ū├┤Š═▒ž ĒÜų¬Ą└─®Č╦ł╠ąąčbų├(╚ńŖA╩ų)į┌╚╬║╬Ģr┐╠ŽÓī”ė┌ A Ą─ĀŅæBŻ¼░³└©╬╗ų├Īóū╦æB║═ķ_ķ]ĀŅæB Ą╚ĪŻ╣ż╝■ A Ą─╬╗ų├╩Ūė╔╦³╦∙į┌╣żū„┼_Ą─ę╗ĮMū°ś╦▌SĮo│÷Ą─ĪŻ▀@ĮMū°ś╦▌SĮąū÷╚╬äš▌S(RĪŻ)ĪŻ ─®Č╦ł╠ąąčbų├Ą─ĀŅæB╩Ūė╔▀@ĮMū°ś╦▌SĄ─įSČÓöĄųĄ╗“ģóöĄ▒Ē╩ŠĄ─Ż¼Č°▀@ą®ģóöĄ╩Ū╩Ė┴┐X Ą─Ęų ┴┐ĪŻ╬ęéāĄ─╚╬䚊═╩Ūę¬┐žųŲ╩Ė┴┐X ļSĢrķgūā╗»Ą─ŪķørŻ¼╝┤ X(t), ╦³▒Ē╩Š─®Č╦ł╠ąąčbų├į┌ ┐šķgĄ─īŹĢr╬╗ų├ĪŻų╗ėą«öĻP╣Ø”╚₁ų┴”╚6 ęŲäėĢrŻ¼X ▓┼ūā╗»ĪŻ╬ęéāė├╩Ė┴┐”╚(t)üĒ▒Ē╩ŠĻP╣Øūā ┴┐ ”╚₁ų┴ ”╚₆ĪŻ
Ė„ĻP╣Øį┌┴”ŠžC₁ ų┴C₆ ū„ė├Ž┬Č°▀\äėŻ¼▀@ą®┴”Šžśŗ│╔╩Ė┴┐C(t) ĪŻ ╩Ė┴┐C(t) ė╔Ė„é„äėļŖ äėÖCĄ─┴”Šž╩Ė┴┐ T(t) Įø▀^ūā╦┘ÖC╦═ĄĮĖ„éĆĻP╣ØĪŻ▀@ą®ļŖäėÖCį┌ļŖ┴„╗“ļŖē║╩Ė┴┐V(t) ╦∙╠ß ╣®Ą─äė┴”ū„ė├Ž┬Ż¼į┌ę╗┼_╗“ČÓ┼_╬ó╠Ä└ĒÖCĄ─┐žųŲŽ┬Ż¼«a╔·┴”Šž T(t)ĪŻ
ī”ę╗┼_ÖCŲ„╚╦Ą─┐žųŲŻ¼▒Š┘|╔ŽŠ═╩Ūī”Ž┬┴ąļpŽ“ĘĮ│╠╩ĮĄ─┐žųŲŻ║
V(t)⇔T(t)⇔C(t)Ī· Ī“(t)Ī·X(t) (5.1)
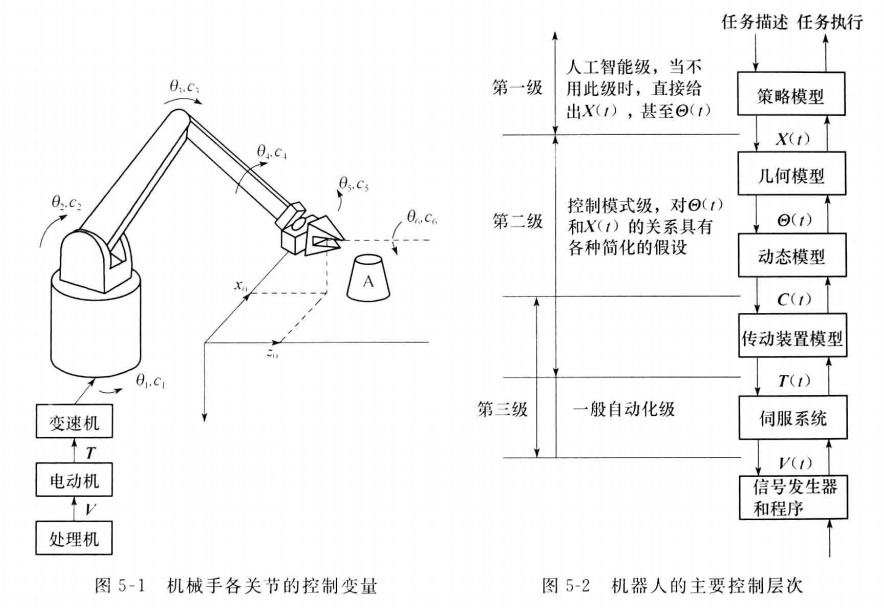
łD5-2▒Ē╩ŠÖCŲ„╚╦Ą─ų„ę¬┐žųŲīė┤╬ĪŻė╔łD┐╔ęŖŻ¼╦³ų„ę¬Ęų×ķ╚²éĆ┐žųŲJŻ¼╝┤╚╦╣żųŪ─▄ JĪó┐žųŲ─Ż╩ĮJ║═╦┼Ę■ŽĄĮyJĪŻ¼Fī”╦³éā▀Mę╗▓Įėæšō╚ńŽ┬ĪŻ
(1)Dę╗JŻ║╚╦╣żųŪ─▄J
╚ń╣¹├³┴Ņę╗┼_ÖCŲ„╚╦╚źĪ░░č╣ż╝■A ╚Ī▀^üĒ!Ī▒─Ū├┤╚ń║╬ł╠ąą▀@éĆ╚╬äš─ž?Ž╚ąĶę¬┤_ Č©Ż¼įō├³┴ŅĄ─│╔╣”ł╠ąąų┴╔┘╩Ūė╔ė┌ÖCŲ„╚╦─▄×ķįōųĖ┴Ņ«a╔·╩Ė┴┐X(t) ĪŻX(t) ▒Ē╩Š─®Č╦ł╠ąąčb ų├ŽÓī”╣ż╝■ A Ą─▀\äėĪŻ
▒Ē╩ŠÖCŲ„╚╦╦∙Š▀ėąĄ─ųĖ┴Ņ║═«a╔·╩Ė┴┐X(t) ęį╝░▀@ā╔š▀ķgĄ─ĻPŽĄŻ¼╩ŪĮ©┴óDę╗J(Z Ė▀J)┐žųŲĄ─╣żū„ĪŻ╦³░³└©┼c╚╦╣żųŪ─▄ėąĻPĄ─╦∙ėą┐╔─▄å¢Ņ}Ż║╚ńį~ģR║═ūį╚╗šZčį└ĒĮŌĪó ęÄäØĄ─«a╔·ęį╝░╚╬äš├Ķ╩÷Ą╚ĪŻ
▀@ę╗Jų„ę¬╚į╠Äė┌蹊┐ļAČ╬ĪŻ╬ęéāīóį┌║¾├µ▀Mę╗▓Į蹊┐┼cųŪ─▄┐žųŲJėąĻPĄ─å¢Ņ}ĪŻ
╚╦╣żųŪ─▄Jį┌╣żśIÖCŲ„╚╦╔Ž─┐Ū░æ¬ė├╚į▓╗ē“ČÓŻ¼▀ĆėąįSČÓīŹļHå¢Ņ}ėą┤²ĮŌøQĪŻ
(2)Ą┌Č■JŻ║┐žųŲ─Ż╩ĮJ
─▄ē“Į©┴óŲ▀@ę╗JĄ─X(t) ║═ T(t) ų«ķgĄ─ļpŽ“ĻPŽĄĪŻąĶę¬ūóęŌĄĮŻ¼ėąČÓĘN┐╔╣®▓╔ė├Ą─ ┐žųŲ─Ż╩ĮĪŻ▀@╩Ūę“×ķŽ┬┴ąĻPŽĄ
X(t)Ī· Ī“(t)Ī·C(t)Ī·T(t) (5.2)
īŹļH╔Ž╠ß│÷Ė„ĘN▓╗═¼Ą─å¢Ņ}ĪŻę“┤╦Ż¼ę¬Ą├ĄĮ ę╗ éĆØMęŌĄ─ĘĮĘ©Ż¼╦∙╠ß│÷Ą─╝┘įO┐╔─▄╩ŪśO▓╗ŽÓ ═¼Ą─ĪŻ▀@ą®╝┘įO╚ĪøQė┌▓┘ū„╚╦åT╦∙Š▀ėąĄ─ėąĻPšnŅ}Ą─ų¬ūR╔ŅČ╚ęį╝░ÖCŲ„╚╦Ą─æ¬ė├ł÷║ŽĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



