

¼Fį┌╩ął÷╔Ž╣®æ¬Ą─╣żśIÖCŲ„╚╦Ż¼ŲõĻP╣ØöĄ×ķ3Ī½7éĆĪŻZĄõą═Ą─╣żśIÖCŲ„╚╦Š▀ėą6éĆĻP ╣ØŻ¼┤µį┌6éĆūįė╔Č╚Ż¼Ä¦ėąŖA╩ų(═©│ŻĘQ×ķ╩ų╗“─®Č╦ł╠ąąčbų├)ĪŻą┴ą┴─Ū╠ß-├ū└Ł┐╦²ł T3 Īó ė╚─ß├Ę▀dĄ─PUMA 650 ║═╦╣╠╣ĖŻÖCąĄ╩ųČ╝╩ŪŠ▀ėą6éĆĻP╣ØĄ─╣żśIÖCŲ„╚╦Ż¼▓óĘųäeė╔ę║ē║Īó ÜŌē║╗“ļŖÜŌé„äėčbų├“īäėĪŻŲõųąŻ¼╦╣╠╣ĖŻÖCąĄ╩ųŠ▀ėąĘ┤ü┐žųŲŻ¼╦³Ą─ę╗éĆĻP╣Ø┐žųŲĘĮ┐“łD ╚ńłD5-11╦∙╩ŠĪŻÅ─łD┐╔ęŖŻ¼╦³ėąéĆ╣ŌīWŠÄ┤aŲ„Ż¼ęį▒Ń┼c£y╦┘░lļŖÖCę╗ŲĮM│╔╬╗ų├║═╦┘Č╚Ę┤üĪŻ▀@ĘN╣żśIÖCŲ„╚╦╩Ūę╗ĘNČ©╬╗čbų├Ż¼╦³Ą─├┐éĆĻP╣ØČ╝ėąę╗éĆ╬╗ų├┐žųŲŽĄĮyĪŻ
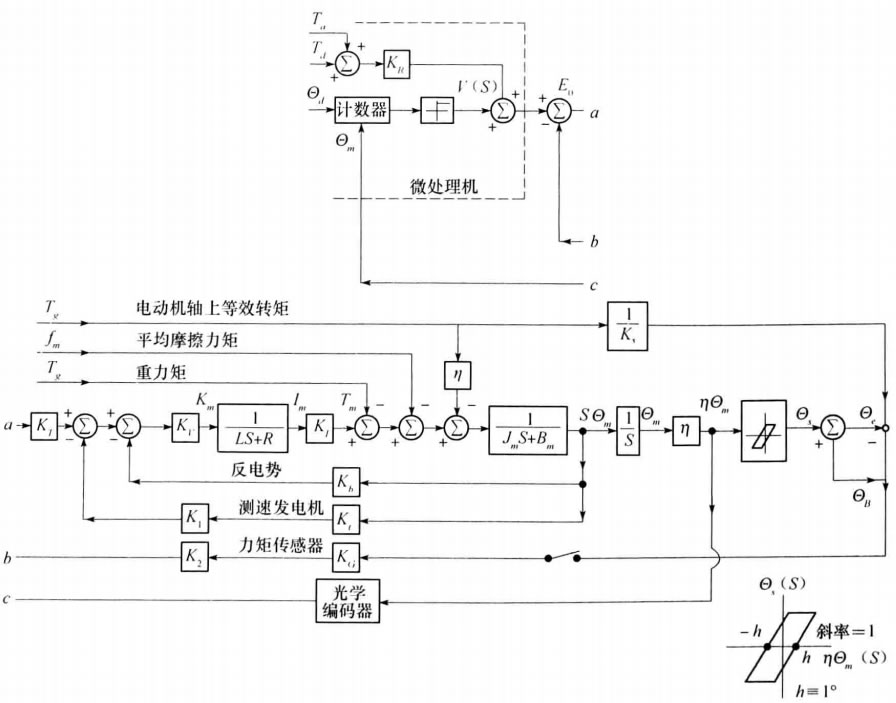
łD5 - 11 ╦╣╠╣ĖŻÖCąĄ╩ųĄ─╬╗ų├┐žųŲŽĄĮyĘĮ┐“łD
╚ń╣¹▓╗┤µį┌┬ĘÅĮ╝s╩°Ż¼─Ū├┤┐žųŲŲ„ų╗ę¬ų¬Ą└ŖA╩ųę¬Įø▀^┬ĘÅĮ╔Ž╦∙ėąųĖČ©Ą─▐DÅسcŠ═ē“ ┴╦ĪŻ┐žųŲŽĄĮyĄ─▌ö╚ļ╩Ū┬ĘÅĮ╔Ž╦∙ąĶę¬▐DÅسcĄ─Ąč┐©ā║ū°ś╦Ż¼▀@ą®ū°ś╦³c┐╔─▄═©▀^ā╔ĘNĘĮĘ© ▌ö╚ļŻ¼╝┤Ż║
1)ęįöĄūųą╬╩Į▌ö╚ļŽĄĮyĪŻ
2)ęį╩ŠĮ╠ĘĮ╩Į╣®ĮoŽĄĮyŻ¼╚╗║¾▀Mąąū°ś╦ūāōQŻ¼╝┤ėŗ╦ŃĖ„ųĖČ©▐DÅسc╠Äį┌Ąč┐©ā║ū°ś╦ ŽĄųąĄ─ŽÓæ¬ĻP╣Øū°ś╦[q₁,ĪŁ,q₆] ĪŻ ėŗ╦ŃĘĮĘ©┼cū°ś╦³cą┼╠¢▌ö╚ļĘĮ╩ĮėąĻPĪŻ
ī”ė┌öĄūų▌ö╚╦ĘĮ╩ĮŻ¼ī”f-¹[q₁,ĪŁ,q₆] ▀MąąöĄūųėŗ╦ŃŻ╗ī”ė┌╩ŠĮ╠▌ö╚ļĘĮ╩ĮŻ¼▀Mąą ─ŻöMėŗ╦ŃĪŻŲõųąŻ¼f-¹[qi,ĪŁ,q₆] ×ķf[q₁,ĪŁ,q₆] Ą──µ║»öĄŻ¼Č° f[q₁,ĪŁ,q₆] ×ķ║¼ėą ┴∙éĆū°ś╦öĄųĄĄ─╩Ė┴┐║»öĄĪŻZ║¾Ż¼ī”ÖCŲ„╚╦Ą─ĻP╣Øū°ś╦³cų³c▀MąąČ©╬╗┐žųŲĪŻ╝┘╚ńį╩įS ÖCŲ„╚╦ę└┤╬ų╗ęŲäėę╗éĆĻP╣ØŻ¼Č°░čŲõ╦¹ĻP╣صiūĪŻ¼─Ū├┤├┐éĆĻP╣Ø┐žųŲŲ„Č╝║▄║åå╬ĪŻ╚ń╣¹ ČÓéĆĻP╣Ø═¼Ģr▀\äėŻ¼─Ū├┤Ė„ĻP╣Øķg┴”Ą─╗źŽÓū„ė├Ģ■«a╔·±Ņ║ŽŻ¼╩╣┐žųŲŽĄĮyūāĄ├Å═ļsĪŻ
å╬ĻP╣Ø┐žųŲŲ„Ą─é„▀f║»öĄ
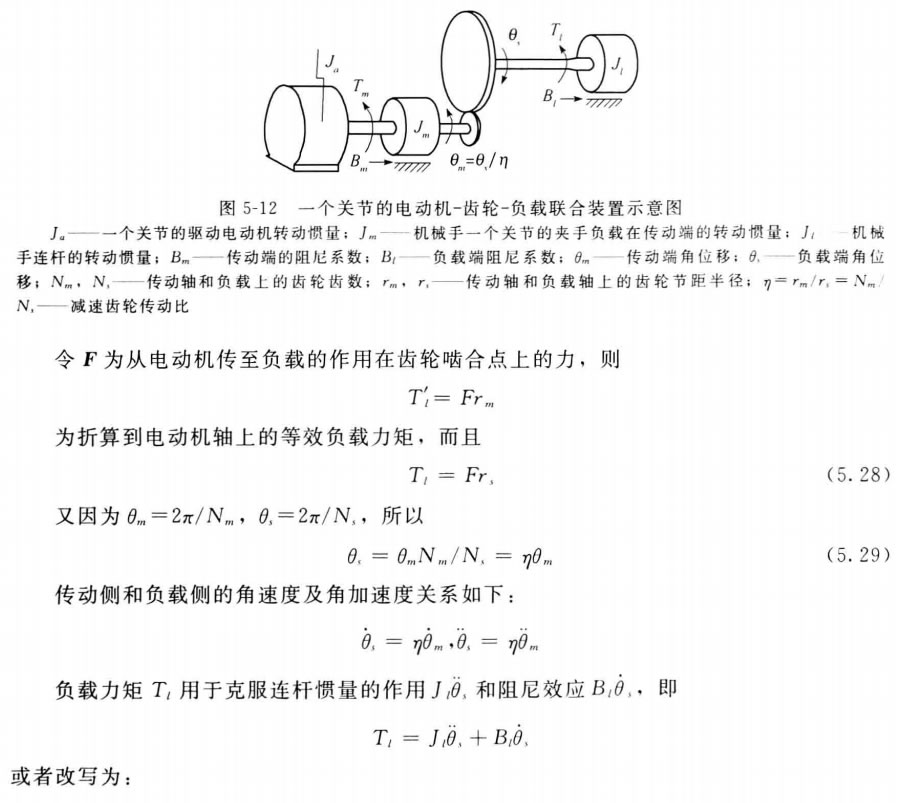
░čÖCŲ„╚╦┐┤ū÷äé¾wĮYśŗĪŻłD5-12Įo│÷å╬éĆĻP╣ØĄ─ļŖäėÖC²X▌å-žō▌d┬ō║Žčbų├╩ŠęŌłDĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



