

─Ż║²┐žųŲ╩Ūę╗ŅÉæ¬ė├─Ż║²╝»║Ž└ĒšōĄ─┐žųŲĘĮĘ©ĪŻ─Ż║²┐žųŲĄ─ėąą¦ąį┐╔Å─ā╔éĆĘĮ├µüĒ┐╝ æ]ĪŻ ę╗ĘĮ├µŻ¼─Ż║²┐žųŲ╠ß╣®ę╗ĘNīŹ¼F╗∙ė┌ų¬ūR(╗∙ė┌ęÄät)Ą─╔§ų┴šZčį├Ķ╩÷Ą─┐žųŲęÄ┬╔Ą─ą┬ÖC└ĒĪŻ
┴Ēę╗ĘĮ├µŻ¼─Ż║²┐žųŲ╠ß╣®┴╦ę╗ĘNĖ─▀MĘŪŠĆąį┐žųŲŲ„Ą─╠µ┤·ĘĮĘ©Ż¼▀@ą®ĘŪŠĆąį┐žųŲŲ„ ę╗░Ńė├ė┌┐žųŲ║¼ėą▓╗┤_Č©ąį║═ļyęįė├é„ĮyĘŪŠĆąį┐žųŲ└Ēšō╠Ä└ĒĄ─čbų├ĪŻ
─Ż║²┐žųŲŽĄĮyĄ─╗∙▒ŠĮYśŗ╚ńłD5-23╦∙╩ŠĪŻŲõųąŻ¼─Ż║²┐žųŲŲ„ė╔─Ż║²╗»Įė┐┌Īóų¬ūRÄņĪó ═Ų└ĒÖC║═─Ż║²┼ąøQĮė┐┌4éĆ╗∙▒Šå╬į¬ĮM│╔ĪŻ
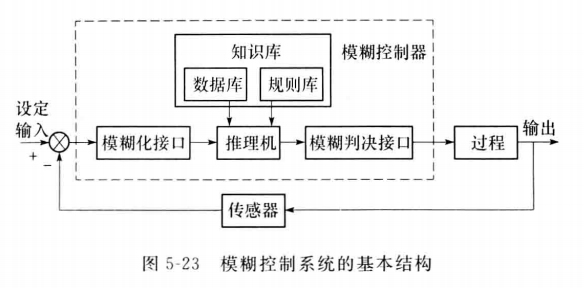
(1)─Ż║²╗»Įė┐┌
£y┴┐▌ö╚ļūā┴┐(įOČ©▌ö╚ļ)║═╩▄┐žŽĄĮyĄ─▌ö│÷ūā┴┐Ż¼▓ó░č╦³éāė│╔õĄĮę╗éĆ║Ž▀mĄ─Ēæ欚ō ė“Ą─┴┐│╠Ż¼╚╗║¾Ż¼£╩┤_Ąž▌ö╚ļöĄō■▒╗ūāōQ×ķ▀m«öĄ─šZčįųĄ╗“─Ż║²╝»║ŽĄ─ś╦ūRĘ¹ĪŻ▒Šå╬į¬┐╔ ęĢ×ķ─Ż║²╝»║ŽĄ─ś╦ėøĪŻ
(2)ų¬ūRÄņ
╔µ╝░æ¬ė├ŅIė“║═┐žųŲ─┐ś╦Ą─ŽÓĻPų¬ūRŻ¼╦³ė╔öĄō■Äņ║═šZčį(─Ż║²)┐žųŲęÄätÄņĮM│╔Ż¼öĄ ō■Äņ×ķšZčį┐žųŲęÄätĄ─šōė“ļx╔ó╗»║═ļ`ī┘║»öĄ╠ß╣®▒žę¬Ą─Č©┴xĪóšZčį┐žųŲęÄätś╦ėø┐žųŲ─┐ ś╦║═ŅIė“īŻ╝ęĄ─┐žųŲ▓▀┬įĪŻ
(3)═Ų└ĒÖC
═Ų└ĒÖC╩Ū─Ż║²┐žųŲŽĄĮyĄ─║╦ą─Ż¼ęį─Ż║²Ė┼─Ņ×ķ╗∙ĄAŻ¼─Ż║²┐žųŲą┼Žó┐╔═©▀^─Ż║²╠N║Ł║═ ─Ż║²▀ē▌ŗĄ─═Ų└ĒęÄätüĒ½@╚ĪŻ¼▓ó┐╔īŹ¼FöM╚╦øQ▓▀▀^│╠Ż¼Ė∙ō■─Ż║²▌ö╚ļ║═─Ż║²┐žųŲęÄätĪó─Ż ║²═Ų└ĒŪ¾ĮŌ─Ż║²ĻPŽĄĘĮ│╠Ż¼½@Ą├─Ż║²▌ö│÷ĪŻ
(4)─Ż║²┼ąøQĮė┐┌
ŲĄĮ─Ż║²┐žųŲĄ─═ŲöÓū„ė├Ż¼▓ó«a╔·ę╗éĆ£╩┤_Ą─╗“ĘŪ─Ż║²Ą─┐žųŲū„ė├Ż╗┤╦£╩┤_┐žųŲū„ė├▒ž ĒÜ▀Mąą─µČ©ś╦(▌ö│÷Č©ś╦),▀@ę╗ū„ė├╩Ūį┌ī”╩▄┐ž▀^│╠▀Mąą┐žųŲų«Ū░═©▀^┴┐│╠ūāōQüĒīŹ¼FĄ─ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



