

īW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)╩ŪųŪ─▄┐žųŲZįńĄ─蹊┐ŅI(l©½ng)ė“ų«ę╗ĪŻį┌▀^╚ź╩«ČÓ─ĻųąŻ¼īW(xu©”)┴Ģ(x©¬)┐žųŲė├ė┌äė(d©░ng)æB(t©żi) ŽĄĮy(t©»ng)(╚ńÖC(j©®)Ų„╚╦▓┘ū„┐žųŲ║═’wąąŲ„ųŲī¦(d©Żo)Ą╚)Ą─蹊┐Ż¼ęč│╔×ķ╚šęµųžę¬Ą─蹊┐šnŅ}ĪŻęčĮø(j©®ng)蹊┐ ▓ó╠ß│÷įSČÓīW(xu©”)┴Ģ(x©¬)┐žųŲĘĮ░Ė║═ĘĮĘ©Ż¼▓ó½@Ą├Ė³║├Ą─┐žųŲą¦╣¹ĪŻ▀@ą®┐žųŲĘĮ░Ė░³└©Ż║
1)╗∙ė┌─Ż╩ĮūR(sh©¬)äeĄ─īW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
2)Ę┤Å═(f©┤)īW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
3)ųžÅ═(f©┤)īW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
4)▀BĮėų„┴xīW(xu©”)┴Ģ(x©¬)┐žųŲŻ¼░³└©į┘äŅ(l©¼)(ÅŖ(qi©óng)╗»)īW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
5)╗∙ė┌ęÄ(gu©®)ätĄ─īW(xu©”)┴Ģ(x©¬)┐žųŲŻ¼░³└©─Ż║²īW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
6)öM╚╦ūįīW(xu©”)┴Ģ(x©¬)┐žųŲŻ╗
7)ĀŅæB(t©żi)īW(xu©”)┴Ģ(x©¬)┐žųŲĪŻ
īW(xu©”)┴Ģ(x©¬)┐žųŲŠ▀ėą4éĆ(g©©)ų„ę¬╣”─▄Ż║╦č╦„ĪóūR(sh©¬)äeĪóėøæø║══Ų└ĒĪŻį┌īW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)Ą─čąųŲ│§ Ų┌Ż¼ī”╦č╦„║═ūR(sh©¬)äeĄ─蹊┐▌^ČÓŻ¼Č°ī”ėøæø║══Ų└ĒĄ─蹊┐▒╚▌^▒Ī╚§ĪŻīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)Ęų×ķā╔ ŅÉŻ¼╝┤į┌ŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)║═ļxŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)Ż¼Ęųäe╚ńłD5-24a ║═łD5-24b ╦∙╩ŠĪŻłDųąŻ¼ R ┤·▒Ēģó┐╝▌ö╚ļŻ╗Y ×ķ▌ö│÷Ēææ¬(y©®ng)Ż╗u ×ķ┐žųŲū„ė├Ż╗s ×ķ▐D(zhu©Żn)ōQķ_ĻP(gu©Īn)ĪŻ«ö(d©Īng)ķ_ĻP(gu©Īn)Įė═©Ģr(sh©¬)Ż¼įōŽĄĮy(t©»ng) ╠Äė┌ļxŠĆīW(xu©”)┴Ģ(x©¬)ĀŅæB(t©żi)ĪŻ
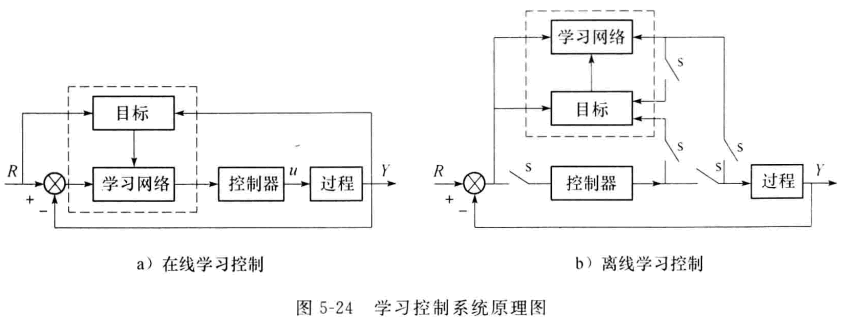
ļxŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)æ¬(y©®ng)ė├▒╚▌^ÅVĘ║Ż¼Č°į┌ŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)ätų„ę¬ė├ė┌▒╚▌^Å═(f©┤)ļsĄ─ļSÖC(j©®)Łh(hu©ón) Š│ĪŻį┌ŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲŽĄĮy(t©»ng)ąĶę¬Ė▀╦┘║═┤¾╚▌┴┐ėŗ(j©¼)╦ŃÖC(j©®)Ż¼Č°Ūę╠Ä└Ēą┼╠¢(h©żo)ąĶę¬╗©┘M(f©©i)▌^ķLĢr(sh©¬)ķgĪŻį┌įS ČÓŪķørŽ┬Ż¼▀@ā╔ĘNĘĮĘ©╗źŽÓĮY(ji©”)║ŽĪŻŽ╚Ż¼¤ošō╩▓├┤Ģr(sh©¬)║“ų╗ę¬┐╔─▄Ż¼Ž╚“×(y©żn)Įø(j©®ng)“×(y©żn)┐é╩Ū═©▀^ļxŠĆ ĘĮĘ©½@╚ĪŻ¼╚╗║¾į┘į┌▀\(y©┤n)ąąųą▀M(j©¼n)ąąį┌ŠĆīW(xu©”)┴Ģ(x©¬)┐žųŲĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |



