

ÖCŲ„╚╦į┌CPGĄ─┐žųŲŽ┬ęčĮøŠ▀éõ┴╦Ž┬ęŌūRĄ─╗Ņäė─▄┴”Ż¼ī”┬Ęørėąę╗Č©Ą─▀m æ¬ąįŻ¼Ą½╩Ū▀Ćų╗─▄├ż─┐Ū░▀MĪŻ×ķ┴╦ūī╦³ūāĄ├┬ö├„ŲüĒŻ¼Š═ę¬┘xėĶ╦³ę╗Č©Ą─ęŌūRŻ¼ūī ęŌūR╚źĖ╔ŅACPG, «a╔·ėąę╗Č©─┐Ą─Ą─ļSęŌäėū„ĪŻ
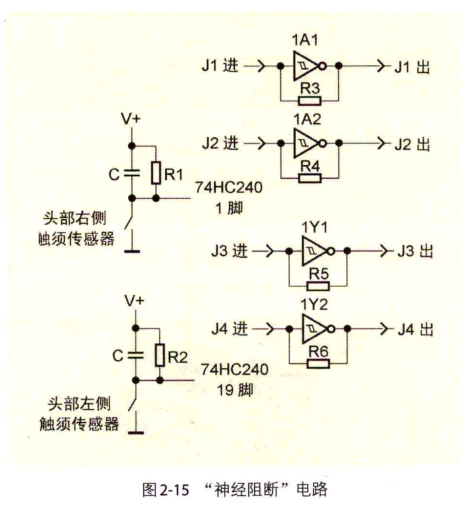
×ķ┴╦║å╗»å¢Ņ}Ż¼╬ęéāęį│ŻęŖĄ─▒▄šŽ╣”─▄×ķ└²Ż¼ūīÖCŲ„╚╦┐╔ęįī”Ū░ĘĮ│÷¼FĄ─╬’¾w ū÷│÷ęÄ▒▄ĪŻį┌łD2-11╦∙╩ŠĄ─ļŖ┬Ę└’Ż¼╬ęįOų├┴╦4éĆöÓ³cĪ¬Ī¬J1 ĪóJ2 ĪóJ3║═J4 ĪŻį┌Ū░├µ Ą─įć“×ųąŻ¼╦³éā╩Ū▀B═©Ą─Ż¼▀@śė▓┼─▄ą╬│╔ę╗éĆ═Ļš¹Ą─CPGŠWĮjĪŻ¼Fį┌ę¬į┌ŠWĮjųą▓Õ ╚ļę╗éĆė╔Įėė|╩Įé„ĖąŲ„ė|░lĄ─Ī░╔±ĮøūĶöÓĪ▒ļŖ┬ĘŻ¼╚ńłD2-15╦∙╩ŠĪŻ
▓─ ┴Ž Ż║
>>74HC240,1 éĆ
>> 47k”ĖļŖūĶ (R3ĪóR4ĪóR5ĪóR6),4 éĆ
>>10”╠F ļŖ╚▌ (C),2 éĆ
>>1M”Ė ļŖūĶ (R1ĪóR2 ),2 éĆ
>>ė|ĒÜé„ĖąŲ„(ūįųŲ),2éĆ
ė|ĒÜé„ĖąŲ„į┌╔Žę╗╣ØųŲū„ÖCŲ„╬øŽüĢręčĮøĮķĮB▀^ĪŻ×ķ┴╦═Ōė^Ų»┴┴Ż¼▀@┤╬ųŲū„ņoŲ¼╩╣ė├Ą─▓─┴Ž╩ŪČ╦ūėąŠ║═³SŃ~╣▄Ż¼░čę╗Ė∙ėąÅŚąįĄ─Įī┘Įz╠ūį┌Ń~╣▄└’ū÷ķ_ĻPĄ─äė Ų¼Ż¼┼÷ĄĮ╬’¾w║¾Ż¼Įī┘Įz║═Ń~╣▄ā╚▒┌Įėė|Ż¼ļŖ┬Ęī¦═©ĪŻ▀@ī”ūįųŲė|ĒÜķ_ĻPĄ─╝Ü╣Ø╚ń łD2-16╦∙╩ŠĪŻ×ķ┴╦ĮĄĄ═ųŲū„ļyČ╚Ż¼ę▓┐╔ęįė├ļŖūĶę²─_ÅØéĆłA╚”ū÷│╔ņoŲ¼ĪŻ
▀@éĆļŖ┬ĘĄ─įŁ└Ē║▄║åå╬Ż¼74HC240 śŗ│╔┴╦ā╔éĆ×ķę╗ĮMĄ─ļŖūėķ_ĻPĪŻūóęŌ▀@┤╬ 74HC240 Ą─╩╣─▄Č╦Ī¬Ī¬1─_║═19─_▓╗ų▒ĮėĮėĄžŻ¼Č°╩Ū▀BĮėĄĮ┴╦ė|ĒÜé„ĖąŲ„║═RC ŠW ĮjĪŻ«öÖCŲ„╚╦Ū░ĘĮø]ėą╬’¾wĢrŻ¼ÄūéĆļŖūėķ_ĻP╠Äė┌ķ_┬ĘĀŅæBŻ¼ CPG ŠWĮjųąŽÓ«öė┌▓Õ ╚ļ┴╦4éĆ╣╠Č©ļŖūĶ (R3 ĪóR4 ĪóR5 ║═R6), ę“×ķ╦³éāĄ─ūĶųĄ▒╚▌^Ą═Ż¼ī”╔±ĮøŠWĮjĄ─ ė░Ēæ┐╔ęį║÷┬į▓╗ėŗĪŻ
«öė|ĒÜ┼÷ĄĮ╬’¾wĢrŻ¼ęįū¾é╚ė|ĒÜ×ķ└²Ż¼74HC240 Ą─19─_ūā│╔Ą═ļŖŲĮŻ¼1Y1║═ 1Y2 ╝ż╗ŅŻ¼╦³éāĢ■╩╣ū¾Ū░═╚║═ū¾║¾═╚śŗ│╔Ą─ų„-Å─╔±Įøį¬Ą─ŽÓ╬╗░l╔·ūā╗»Ż¼ų„Å─ĻP ŽĄŅŹĄ╣Ż¼ŽÓ«öė┌ū¾Ū░═╚ūā│╔ū¾║¾═╚Ż¼ū¾║¾═╚═Žų°ū¾Ū░═╚äėū„Ż¼ÖCŲ„╚╦▀@ę╗é╚╔Ē¾wĄ─ ╗ŅäėĢ■£p╚§▓ó░l╔·Ę┤Ž“Ż¼ÖCŲ„╚╦īóū÷│÷Ž“ėę╣šÅØĄ─äėū„ĪŻ«ö╚╗Ż¼īŹļHŪķør▓ó▓╗▀@├┤ ║åå╬Ż¼ę“×ķCPG ▓óø]ėąšµš²ĄžöÓķ_Ż¼ų╗╩Ū▓Õ╚ļ┴╦ę╗éĆūā┴┐Ż¼ZŽ╚╩▄ĄĮė░ĒæĄ─╩Ūū¾é╚ ╔Ē¾wŻ¼▀MČ°═©▀^CPG ┬¹čėĄĮÖCŲ„╚╦Ą─š¹éĆų½¾wĪŻ
Č°«öū¾Īóėęā╔éĆė|ĒÜ═¼Ģr┼÷ĄĮ╬’¾wĢrŻ¼ŪķørŠ═ūāĄ├Ė³ėą╚ż┴╦Ż¼ÖCŲ„╚╦Ģ■░l╔· Ī░Įø├}┤¾─µ▐DĪ▒,Ņ^ūā─_Ż¼─_ūāŅ^Ż¼Ą╣═╦ų°ąąū▀ĪŻ╚ń╣¹─ŃėXĄ├▀@śėĄ─ĮŌßī▓╗ē“ą╬ Ž¾Ż¼Š═ŽļŽļĮė╣╣PŽ┬╬„ČŠĄ─Ž┬ł÷░╔!«ö╚╗▀@éĆĀŅæBų╗╩ŪĢ║ĢrĄ─Ż¼ RC ŠWĮjĘ┼ļŖ═Ļ«ģ ║¾ Ż¼CPGĢ■ė├ÄūĮM╝Ī╚Ōą┼╠¢░č╦³į┘┤╬╦óą┬ĄĮš²│ŻĀŅæBĪŻ
ūóŻ║╬─ųąĮo│÷Ą─RCŠWĮjöĄųĄ▓╗╩Ū╣╠Č©Ą─Ż¼ų╗╩ŪĮø▀^īŹ“×┤_Č©▀@éĆčėĢrĢrķL┐╔ ęįūīÖCŲ„╚╦ū÷│÷ėąą¦Ą─ęÄ▒▄äėū„ĪŻ═µ╝ę┐╔ęįĖ∙ō■īŹļHŪķørūįąąš{š¹ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



