

ÖCŲ„╚╦Ą─“īäėĘĮ╩Į▓ó▓╗╩ŪųĖÖCŲ„╚╦Ą─äė┴”Š┐Š╣╩Ūė╔ļŖÖC╠ß╣®Ą─▀Ć╩Ūė╔ā╚╚╝ÖC╠ß╣®Ą─Ż¼Č° ╩ŪųĖ╚ń║╬ūīÖCŲ„╚╦ąąäėŲüĒĄ─ĪŻ▒╚╚ńŻ¼ėąĄ─ÖCŲ„╚╦ų╗ėąā╔éĆ▌åūė“īäėŻ¼ėąĄ─ÖCŲ„╚╦ätėą 3éĆ▌åūė“īäėŻ¼ėąĄ─ÖCŲ„╚╦╩╣ė├ČÓūŃ▓ĮąąĄ─ĘĮ╩Įąą▀MŻ¼╔§ų┴▀ĆėąĄ─ÖCŲ„╚╦─▄Ž±╔▀ę╗śė┼└ ąąŻ¼Ž±▒┌╗óę╗śė┼╩╔Žē”▒┌ĪŻ═¼īWéāŽļ▀^ø]ėąŻ¼×ķ╩▓├┤╬ęéāį┌įOėŗÖCŲ„╚╦Ģrę¬ėą▀@├┤ČÓ▓╗═¼ ĘNŅÉĄ─“īäėĘĮ╩Į─ž?īŹļH╔ŽŻ¼▀@ą®▓╗═¼Ą─“īäėĘĮ╩ĮĖ„ėąĖ„Ą─ķL╠ÄŻ¼łD3-1╩ŪÄūĘN│ŻęŖÖCŲ„ ╚╦“īäėĘĮ╩ĮĄ─╩Š└²ĪŻ
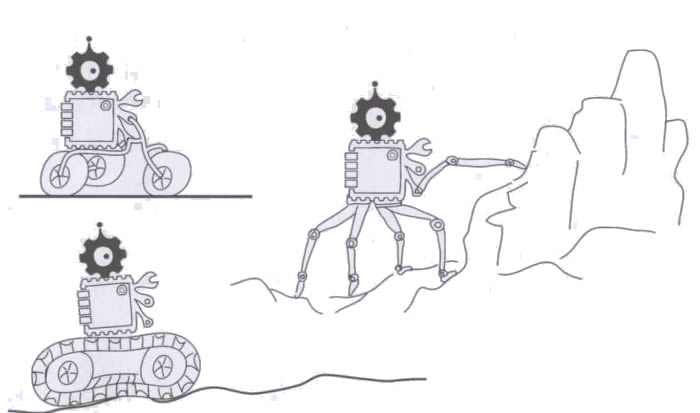
▒╚╚ńŻ¼╚²▌å▄ć╩ĮĄ─ÖCŲ„╚╦Ż¼Š═║═╬ęéā╚š│Ż╔·╗Ņųą│ŻęŖĄ─╚²▌å▄ć║▄ŽÓŽ±Ż¼╦³ę╗░Ńėąę╗éĆ ļŖÖCžōž¤▐Däėā╔éĆ║¾▌åŻ¼╠ß╣®äė┴”Ż¼┴Ēę╗éĆļŖÖCžōž¤▐DäėŪ░▌åŻ¼┐žųŲąą▀MĄ─ĘĮŽ“ĪŻ▀@śėĄ─ ÖCŲ„╚╦▓┘┐žŲüĒ║▄║åå╬Ż¼ĘĮŽ“║═╦┘Č╚─▄ĘųäeĄ├ĄĮ┐žųŲĪŻĄ½╩Ū╦³Ą─╚▒³cę▓║▄├„’@Ż¼į┌▓╗ŲĮ╠╣Ą─ĄžĘĮŻ¼▀@ĘNÖCŲ„╚╦Š═║▄╚▌ęūĘŁ▄ćĪŻ┴Ē═ŌŻ¼▀@ĘNÖCŲ„╚╦╩Ū▓╗─▄įŁĄž▐DÅØĄ─Ż¼Č°╩Ūėąę╗éĆZ ąĪ▐DÅØ░ļÅĮĪŻ“T▀^╚²▌å▄ćĄ─═¼īWéāČ╝ų¬Ą└Ż¼╝┤╩╣░č╚²▌å▄ćĄ─▄ć░č▐DĄĮZ┤¾ĮŪČ╚Ż¼╚²▌å▄ćę▓ ▓╗─▄įŁĄž▐DäėŻ¼╦³ų╗─▄┼▄ę╗éĆ▓╗ąĪĄ─łAą╬Ż¼ī”åß?Č°▀@éĆłAĄ─░ļÅĮŻ¼Š═╩ŪÖCŲ„╚╦Ą─ZąĪ▐D ÅØ░ļÅĮ└▓! į┘▒╚╚ńŻ¼┬─Ħ╩ĮÖCŲ„╚╦┐╔ęį║▄║├Ąž▀mæ¬▓╗ŲĮ╠╣Ą─Ąž├µŁhŠ│Ż¼╠╣┐╦▄ćŠ═╩ŪZ║├Ą─└²ūėĪŻ Ą½╩Ū╦³ę▓ėą╦┘Č╚ŽÓī”▒╚▌^┬²Īó╦┘Č╚║═ĘĮŽ“▓╗─▄Ęųäe┐žųŲĪó─”▓┴┴”┤¾╝░─▄┴┐ōp╩¦┤¾Ą─╚▒³cĪŻ ┐╔ęŖŻ¼į┌ŲĮ╠╣Ą─ŁhŠ│ųąŻ¼╬ęéāŠ═ø]▒žę¬ė├┬─Ħ╩ĮÖCŲ„╚╦┴╦ĪŻ
▀Ć▒╚╚ńŻ¼╬Õ╗©░╦ķTĄ─▓ĮąąÖCŲ„╚╦Ż¼╦³éāĄ─ų„ę¬ģ^äeį┌ė┌═╚Ą─öĄ─┐Ż¼Å─ļpūŃĪó╦─ūŃĄĮ ┴∙ūŃĪó░╦ūŃŻ¼▓╗ę╗Č°ūŃĪŻ▀@ŅÉÖCŲ„╚╦ī”Ąžą╬Ą─▀mæ¬─▄┴”ĘŪ│ŻÅŖŻ¼╩└Įń╔ŽZŽ╚▀MĄ─╦─ūŃ▓Įąą ÖCŲ„╚╦ęčĮø┐╔ęįĘŁ╔ĮįĮÄXĪó┐ńįĮšŽĄKŻ¼┤·╠µ╚╦ŅÉł╠ąą║▄ČÓÅ═ļsĄ─╚╬äš┴╦ĪŻ
┐éČ°čįų«Ż¼ÖCŲ„╚╦ę¬Ė∙ō■īŹļHł╠ąą╚╬䚥─ŁhŠ│▓╗═¼▀xō±Z║Ž▀mĄ─“īäėĘĮ╩ĮĪŻ
ÖCŲ„╚╦▓╔ė├Ą─╩ŪZ×ķ│ŻęŖĄ─ę╗ĘNÖCŲ„╚╦“īäėĘĮ╩ĮĪ¬Ī¬ļp▌å▓Ņ╦┘“īäėĪŻ┤¾╝ę į┌░▓čbÖCŲ„╚╦Ą─Ģr║“æ¬įōįńŠ═░l¼F┴╦Ż¼╬ęéāĄ─ąĪÖCŲ„╚╦ėąā╔éĆļŖÖC║═ā╔éĆ▌åūė(▀@└’▓╗┐╝ æ]ų„ę¬Ųų¦ō╬ū„ė├Ą─ąĪ─_▌å)ĪŻī”ė┌▓╔ė├▀@ĘN“īäėĘĮ╩ĮĄ─ÖCŲ„╚╦üĒšfŻ¼«ö╦³▀\äėĢrŻ¼¤oĘŪ ėą▀@├┤ÄūĘNŪķørŻ║ū¾▌å║═ėę▌åęį═¼śėĄ─╦┘┬╩Ž“Ū░▐DäėŻ¼ÖCŲ„╚╦Ž“š²Ū░ĘĮŪ░▀MŻ╗ū¾▌å║═ėę▌å ęį═¼śėĄ─╦┘┬╩Ž“║¾▐DäėŻ¼ÖCŲ„╚╦Ž“š²║¾ĘĮ║¾═╦Ż╗ū¾▌å║═ėę▌åĄ─▐Däė╦┘Č╚▓╗═¼ĢrŻ¼ÖCŲ„╚╦Š═ ▐DÅØ┴╦Ż¼Č°▐DÅØ░ļÅĮĄ─┤¾ąĪ╚ĪøQė┌ū¾ėęā╔éĆ▌åūėĄ─▐Däė╦┘Č╚ų«▓ŅĪŻ▀Ćėąę╗ĘN╠ž╩ŌĄ─ŪķørŻ¼ ╚ń╣¹ū¾▌å║═ėę▌åĄ─▐Däė╦┘┬╩ŽÓ═¼Ż¼Ą½╩ŪĘĮŽ“š²║├ŽÓĘ┤ĢrŻ¼ÖCŲ„╚╦Š═┐╔ęįīŹ¼FįŁĄž▐DäėĪŻłD 3-2šf├„┴╦▀@ÄūĘN▓╗═¼Ą─▀\äėŪķørĪŻ
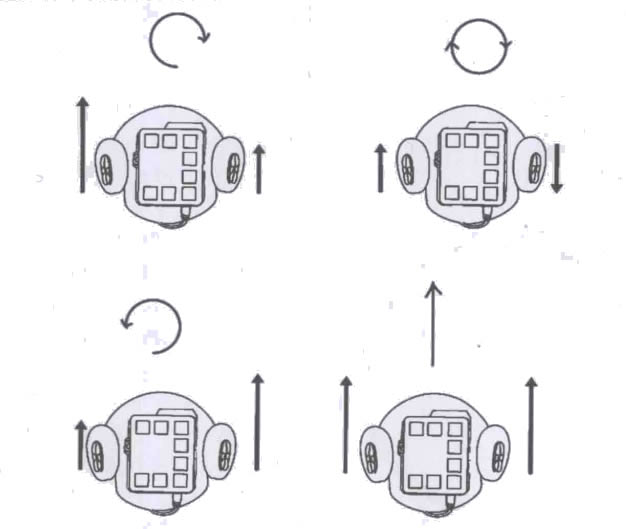
×ķ╩▓├┤ļp▌å▓Ņ╦┘“īäė─▄│╔×ķÖCŲ„╚╦ųąZ×ķ┴„ąąĄ─“īäėĘĮ╩Į─ž?▀@╩Ūę“×ķ▀@ĘN“īäėĘĮ ╩Įėą║▄ČÓ├„’@Ą─ā׳cĪŻŽ╚Ż¼▓╔ė├▀@ĘNĘĮ╩ĮĄ─ÖCŲ„╚╦╩Ū┐┐ā╔éĆd┴óĄ─▌åūėīŹ¼F▀\äėĄ─Ż¼▀@ śėĄ─ĮYśŗ║åå╬Ż¼ÖCŲ„╚╦Ą─▀\äė║▄╚▌ęū┐žųŲĪŻŲõ┤╬Ż¼▀@ĘNÖCŲ„╚╦▀Ć┐╔ęį║▄ņ`╗ŅĄžīŹ¼F▐DÅØ░ļ ÅĮ×ķ0Ą─įŁĄž▐DäėĪŻ«ö╚╗Ż¼╦³Ą─╚▒³c║═ā׳cę╗śė├„’@Ż║║═╚²▌å▄ć╩ĮĄ─ÖCŲ„╚╦ŅÉ╦ŲŻ¼į┌▓╗ŲĮ ╠╣Ą─Ąž├µ╔Ž▀\äėĢrŻ¼▀@ĘNÖCŲ„╚╦Ą─ĘĆČ©ąįŠ═╩ŪéĆ┤¾å¢Ņ}┴╦ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



