ÖCŲ„╚╦╠ū╝■└’ą╬ą╬╔½╔½Ą─é„ĖąŲ„║═ł╠ąąŲ„╩Ū╚ń║╬▀BĮėĄĮų„┐žųŲŲ„╔ŽĄ──ž?┤¾╝ę─├│÷ų„┐žŲ„Ż¼┐╔ęį┐┤ĄĮ╦³Ą─╔Ž├µėą║▄ČÓĮī┘▓ÕßśŻ¼ī”æ¬ė┌łD4-1ųąöĄūų▌ö╚ļ/▌ö│÷Č╦┐┌Īó─ŻöM▌ö ╚ļČ╦┐┌Ą─╬╗ų├Ż¼▀@ą®▓Õßś╩Ū╬ęéā▀BĮė╦∙ėąé„ĖąŲ„Īół╠ąąŲ„Ą─▓Õ┐┌ĪŻ
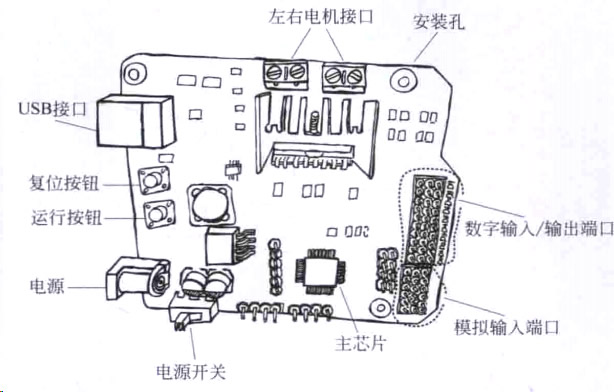
╬ęéāĄ─ų„┐žųŲŲ„┐╔ęįė├▀@ą®▓Õßś║═Ė„ĘNé„ĖąŲ„╗“ł╠ąąŲ„╣▓═¼╣żū„ĪŻĄ½╩ŪŻ¼į┌ųvĄĮ▀@ą®▓ÕßśĄ─
Š▀¾w║¼┴xų«Ū░Ż¼▀Ć┐╔ęįė├ę╗ĘNĖ³╝ė║åå╬Ą─ĘĮ╩Į ū÷═¼śėĄ─╩┬ŪķĪŻ
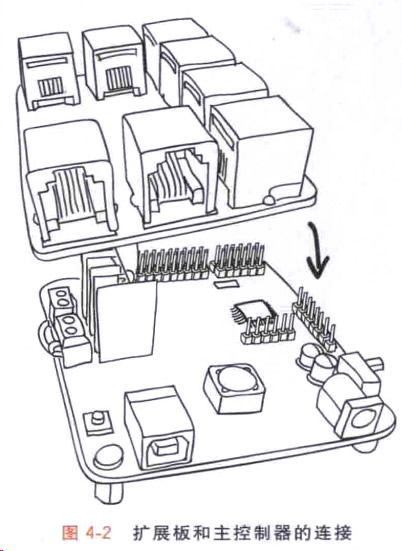
łD4 - 2╩Ū╬ęéā×ķÖCŲ„╚╦┼õéõĄ─ öUš╣ĮėŠĆ░ÕĪŻīó╦³║═ų„┐žųŲŲ„▓ÕĄĮ ę╗Ų║¾Ż¼Š═ ─▄║▄ĘĮ▒ŃĄžė├╗ę╔½Ą─RJ11 ŠĆ▀BĮėĖ„ĘNé„ĖąŲ„ ║═ł╠ąąŲ„Ż¼Č°▓╗ė├ō·ą─ŠĆ┬Ę▀BÕe╗“▀BĘ┤ĪŻ
▀@ĘN║åå╬Ą─ĘĮĘ©▓╗╩Ūø]ėą┤·ārĄ─Ż¼ę“×ķöU š╣░Õš╝ė├Ą─┐šķgĖ³┤¾Ż¼╦∙ęį╠ß╣®Ą─Įė┐┌Š═╔┘┴╦ ║▄ČÓ
ĪŻ
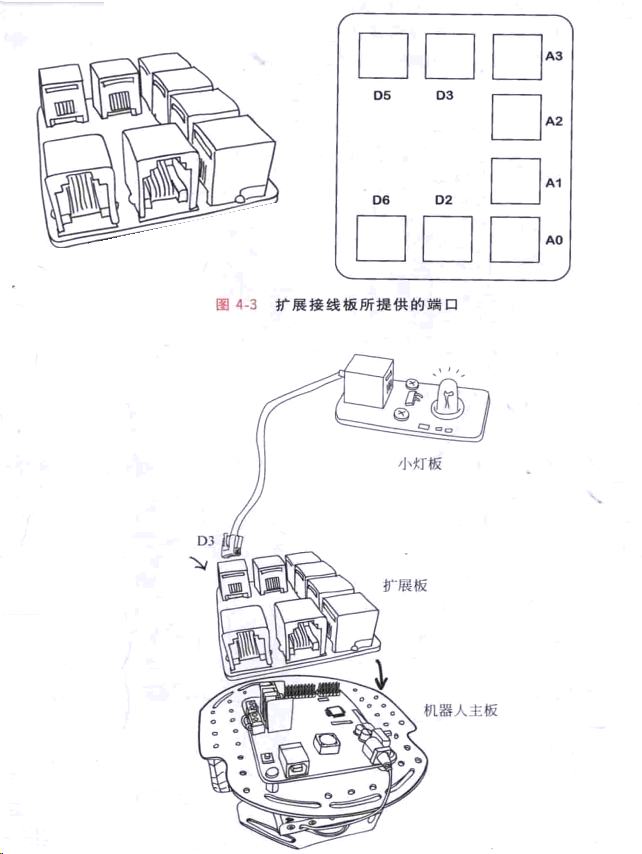
╦³╔Ž├µų╗ėą D2ĪóD3ĪóD5ĪóD6ĪóA0ĪóA1ĪóA2 ║═ A3 ╣▓8éĆČ╦┐┌Ą─╬╗ų├(ęŖłD4- 3)ĪŻ▓╗▀^Ż¼▀@ą®Č╦┐┌─┐Ū░ęčĮøūŃē“ė├┴╦ĪŻ
▒Š╣Øšn╬ęéāėųę¬ė├ĄĮęčĮø╩ņŽż┴╦Ą─ LED ąĪ¤¶─ŻēKŻ¼╬ęéāė├ę╗Ė∙╗ę╔½Ą─▀BĮėŠĆ░č╦³║═ų„┐žŲ„▀BŲüĒĪŻ▀BĮėĢr╚ń╣¹┬ĀĄĮĪ░▀ŪÓĻĪ▒ ę╗ ┬Ģ▌p ĒæŻ¼Š═┤·▒Ē▀BĮė│╔╣”ĪŻÖCŲ„╚╦Ą─▀BĮė╚ńłD4-4
╦∙╩ŠĪŻ
│ŻęŖĄ─ę╗ĘNÖCŲ„╚╦“īäėĘĮ╩ĮĪ¬ļp▌å▓Ņ╦┘“īäė,ū¾▌å║═ėę▌åęį═¼śėĄ─╦┘┬╩Ž“Ū░▐DäėŻ¼ÖCŲ„╚╦Ž“š²Ū░ĘĮŪ░▀MŻ╗ū¾▌å║═ėę▌å ęį═¼śėĄ─╦┘┬╩Ž“║¾▐Däė,▐DÅØ░ļÅĮĄ─┤¾ąĪ╚ĪøQė┌ū¾ėęā╔éĆ▌åūėĄ─▐Däė╦┘Č╚ų«▓Ņ
ÖCŲ„²öėąę╗éĆPWM“īäėĄ─╗Ņäė Ąū▒PŻ¼Ąū▒P╔Ž┤Ņ▌d┴╦ę╗éĆ┐╔ą²▐DĄ─é„ĖąŲ„ŲĮ┼_Ż¼ÖCŲ„╚╦Ņ^▓┐įOų├┴╦ę╗éĆŠÓļxé„Ėą Ų„Ż¼Ąū▒PŽ┬čbėą4éĆ▀ģŠēé„ĖąŲ„
ųŲū„ņoŲ¼╩╣ė├Ą─▓─┴Ž╩ŪČ╦ūėąŠ║═³SŃ~╣▄Ż¼░čę╗Ė∙ėąÅŚąįĄ─Įī┘Įz╠ūį┌Ń~╣▄└’ū÷ķ_ĻPĄ─äė Ų¼Ż¼┼÷ĄĮ╬’¾w║¾Ż¼Įī┘Įz║═Ń~╣▄ā╚▒┌Įėė|Ż¼ļŖ┬Ęī¦═©,ęįė├ļŖūĶę²─_ÅØéĆłA╚”ū÷│╔ņoŲ¼
ļŖÖCĄ─▓╝ŠųĮ©ūh╔į╬ó┐┐║¾Ż¼Įoā╔ŚlŪ░═╚┴¶│÷ČÓ ę╗³c╗Ņäė┐šķgĪŻę“×ķŪ░├µųŲū„Ą─CPG ╩Ūų„-Å─╔±Įøį¬ĮYśŗŻ¼Ū░═╚Ħų°║¾═╚ū▀Ż¼Ū░═╚Ą─äėū„Ę∙Č╚┤¾ė┌║¾═╚ĪŻ▀@śėĄ─įOėŗ┐╔ęį╩╣ÖCŲ„╚╦┐ńįĮ┬Ę├µ╔ŽĄ─ę╗ą®ąĪšŽĄK
╔±ĮøŠWĮjųąūŅĻPµIĄ─į¬╝■╩ŪļŖūĶR3,R3Ą─ūĶųĄ▀^ąĪŻ¼ū¾Īó ėęā╔é╚ÖC¾wŠ═¤oĘ©ģfš{▀\▐DŻ¼ÖCŲ„╚╦Š═║├Ž±║╚ūĒ┴╦ę╗śėĪŻīŹļHR3Ą─ūĶųĄ┐╔ęį▀x╚Ī 1~10M”Ė
,74HC240,4éĆ,╣Ō├¶Č■śO╣▄Ż¼2éĆ,0.22”╠F¤ośOļŖ╚▌Ż¼6éĆ,╬óą═ļŖÖCŻ¼2éĆ,1M”ĖļŖūĶŻ¼6éĆ,1.5M”ĖļŖūĶŻ¼2éĆ,PCļŖį┤Č╦ūė(─ĖŻ¼▓ąŠ),2╬╗,ąĪą═ē║ŠĆČ╦ūė(▓ąŠ),2╬╗,3mm³SŃ~╣▄(┐╔▀x),1ąĪČ╬,RCA▓ÕŅ^╬▓╗╔Ż¼1éĆ
╣ŌļŖĖ·█ÖŅ^Ą─Ėą╣Ōį¬╝■┐╔ęį╩╣ė├╚╬║╬ęÄĖ±Ą─╣Ō├¶Č■śO╣▄╗“╝t═ŌŠĆĮė╩šČ■śO╣▄;74HC240 į┌▀@└’ū„×ķā╔ĮM╔±Įøį¬ļŖ┬Ę╩╣ė├;74HC245 ╩ŪąĪą═BEAM ÖCŲ„╚╦│Żė├Ą─ļpŽ“ļŖÖC“īäėąŠŲ¼
ļŖÖC×ķÖCŲ„╚╦ųŲū„ųą│Żė├Ą─N20 ╬óą═£p╦┘ļŖÖCŻ¼ś╦ĘQļŖē║×ķ6V;Ėą╣Ōį¬╝■┤«┬ōį┌ļŖį┤ā╔Č╦;ąŠŲ¼Ą─Ą┌1/19─_×ķ ╩╣─▄Č╦Ż¼īŹļH╩╣ė├ųąę¬ĮėĄ═ļŖŲĮ;Č╦ūėąŠ╚Īūį╣żśI▀BĮėŲ„└’├µĄ─ĮėŠĆ┼┼ū∙
ÖCŲ„╚╦ļŖūė▓┐ĘųĄ─ų„ę¬į¬╝■╩╣ė├Ą─╚²śO╣▄╩ŪC1815, ┐╔ęį╠µōQ│╔ļŖ┴„Ė³┤¾Ą─8050,ę▓┐╔ęį╩╣ ė├Ųõ╦¹ą═╠¢Ą─ąĪ╣”┬╩NPN ą═╚²śO╣▄ĪŻõćļŖ│ž│õļŖŲ„ė├ę╗éĆł¾ÅUĄ──”═ą┴_└Ł╩ųÖC│õļŖŲ„(ś╦ĘQ▌ö│÷ 4.4V/1A)Ė─įņČ°│╔
ÖCŲ„╚╦Ą─╔Ē¾wĪŻ╔Ē¾w╩Ūę╗éĆė╔ā╔éĆļŖÖC“īäėĄ─┐╔ęįūįė╔╗ŅäėĄ─ąĪ ▄ć╩ĮĄū▒PĪŻ╔Ē¾wŽÓ«öė┌ÖCŲ„╚╦Ą─╣Ū╝▄Ż¼ÖCŲ„╚╦Ą─é„ĖąŲ„║═┐žųŲŲ„Č╝┤Ņ▌dį┌╦³╔Ž├µĪŻ ▄ć▌å║═ļŖÖCśŗ│╔┴╦ÖCŲ„╚╦Ą─▀\äėŲ„╣┘
╔Ž╬╗ÖC▄ø╝■žōž¤Ė∙ō■š`▓Ņą┼╠¢,╦┼Ę■┐žųŲŲ„Å─ų„ÖCĄ├ĄĮ┐žųŲųĖ┴Ņ,▀Mąą▀m«öĄ─╠Ä└Ē║¾«a╔·ŽÓæ¬Ą─PWM ļŖÖC┐žųŲą┼╠¢┐žųŲļŖÖC▐Däė,└¹ė├╔Ž╬╗ÖCĄ─ CMOS Č©ĢrüĒīŹ¼FŻ¼┐╔ęįŠ½┤_ĄĮ╬ó├ļ╝ē
ę╗ĘNĖĮ╝ė┴”═ŌŁhĄ─ÖCŲ„╚╦┴”/╬╗ų├ūį▀mæ¬─Ż║²┐žųŲĘĮĘ©,╩Ū░č┴”┐žųŲŲ„Ą─▌ö │÷ū„×ķ╬╗ų├┐žųŲĮoČ©Ą─ą▐š²ųĄŻ¼═©▀^╠ßĖ▀╬╗ų├┐žųŲĄ─Š½Č╚▀_ĄĮ┐žųŲ┴”Ą──┐Ą─Ż¼▓ó└¹ė├ūį ▀mæ¬─Ż║²┐žųŲĄ─¶ö░¶ąįŻ¼╩╣┐žųŲŽĄĮyī”▓╗═¼Ą─äéąįŁhŠ│Š▀ėąūį▀mæ¬─▄┴”






