

Z║åå╬Ą─é„ĖąŲ„╩Ū╩▓├┤,╬ęę╗Č©Ģ■╗ž┤╩Ū╬óė|ķ_ĻPŻ¼╚ńłD5-1 ╦∙╩ŠĪŻŲõīŹ╦³║═╬ęéā╔·╗Ņųą│Ż│ŻęŖĄĮĄ─ķ_ĻPø]ėą╠½┤¾ģ^äeĪŻ
╬óė|ķ_ĻPę▓ų╗ėąĪ░ķ_Ī▒║═Ī░ķ]Ī▒ ā╔ĘN▓╗═¼Ą─ĀŅæBŻ¼▓╗▀^╦³ī”ė┌ė|┼÷╩ŪĘŪ│Ż├¶ĖąĄ─Ż¼ų╗ę¬╔į╬ó┼÷ĄĮę╗³c³cŻ¼ķ_ĻPŠ═Ģ■║Ž╔ŽĪŻ ╚ń╣¹░č╦³▀BĮėĄĮų„┐žųŲŲ„Ż¼ė├│╠ą“Š═─▄║▄£╩┤_ĄžÖz£yĄĮ╦³Ą─ķ_ķ]ūā╗»┴╦ĪŻ═¼īWéāŽļŽļ┐┤Ż¼ ╦³╩Ū▓╗╩Ū║═└źŽxĄ─ė|ĮŪ║▄Ž±─ž?╬ęéā▀@╣ØšnŠ═ę¬ė├ā╔éĆ╬óė|ķ_ĻPé„ĖąŲ„üĒ─ŻöM└źŽxė|ĮŪ Ą─╣”─▄ĪŻ
ī”ė┌ÖCŲ„╚╦üĒšfŻ¼╬óė|ķ_ĻPŠ═╩Ūę╗éĆ▌ö╚ļŲ„╝■ĪŻŠ┐Š╣╩▓├┤╩Ū▌ö╚ļŻ¼╩▓├┤╩Ū▌ö│÷─ž?╬ę éāį§├┤└¹ė├ų„┐žųŲŲ„Ą─▌ö╚ļ║═▌ö│÷╣”─▄─ž?ŲõīŹ▀@éĆĖ┼─ŅĘŪ│Ż║åå╬Ż¼╚ń╣¹īóų„┐žųŲŲ„Ą─ ę╗éĆČ╦┐┌▀BĮėĄĮé„ĖąŲ„Ż¼╦³Š═╩Ū▒╗ū„×ķę╗éĆ▌ö╚ļČ╦┐┌į┌╩╣ė├Ż¼ę“×ķ╬ęéāę¬└¹ė├é„ĖąŲ„ūx╚ļ ĻPė┌ŁhŠ│Ą─ą┼ŽóĪŻČ°Ę┤ų«Ż¼╚ń╣¹īóČ╦┐┌▀BĮėĄĮł╠ąąŲ„Ż¼▒╚╚ńę╗éĆLED ąĪ¤¶─ŻēK╗“ę╗éĆĘõ °QŲ„─ŻēKŻ¼─Ū├┤╦³Š═ūā│╔┴╦ę╗éĆ▌ö│÷Č╦┐┌Ż¼ę“×ķ╬ęéā╩Ūė├▌ö│÷ą┼Žó╚ź┐žųŲł╠ąąŲ„ł╠ąąę╗ą® äėū„ĪŻ
į┌Arduino ų„┐žųŲŲ„ųąŻ¼├┐éĆČ╦┐┌Č╝╝╚┐╔ęįė├ū„▌ö╚ļČ╦┐┌ėų┐╔ęįė├ū„▌ö│÷Č╦┐┌Ż¼═¼īW éāąĶę¬į┌╩╣ė├ĢrĖ∙ō■īŹļHė├═Šīó╦³éāįOų├×ķ▀m«öĄ─ĘĮŽ“ĪŻ▀@ĢrŠ═ę¬┐┤ĄĮŪ░├µšn│╠ųąęčĮø ęŖĄĮ▀^Ą─ę╗éĆĪ░╩ņ├µ┐ūĪ▒Ī¬Ī¬pinMode ├³┴ŅŻ¼╦³Ą─ė├Ę©╚ńŽ┬Ż║
pinMode(3,INPUT);
pinMode(5,OUTPUT);
«ö╬ęéā▀@śė╩╣ė├pinMode ├³┴ŅĢrŻ¼ŠÄ╠¢×ķ3╠¢Ą─Č╦┐┌ūā│╔▌ö╚╦─Ż╩ĮŻ¼ų«║¾Š═─▄╩╣ė├╔Ž├µ ▀BĮėĄ─é„ĖąŲ„┴╦ĪŻ5╠¢Č╦┐┌ätūā│╔▌ö│÷─Ż╩ĮŻ¼╚ń╣¹ę¬▓┘┐vĄ─╩ŪLED ąĪ¤¶╗“Ęõ°QŲ„ų«ŅÉĄ─ ł╠ąą─ŻēKŻ¼Š═ę╗Č©ę¬ėøĄ├īóČ╦┐┌įOų├×ķ▌ö│÷─Ż╩ĮĪŻ
ę╗░ŃĄžŻ¼╬ęéāį┌ŠÄīæ│╠ą“Ģrų╗ąĶę¬įOų├ę╗┤╬Č╦┐┌Ą─ĘĮŽ“Š═ē“┴╦ĪŻšł═¼īWéā╗žŽļę╗Ž┬ Arduino Ą─│╠ą“ĮYśŗŻ¼pinMode ▀@éĆ├³┴ŅZ▀m║Ž│÷¼FĄ─Ąž³c╩Ū▓╗╩Ūsetup ųą─ž?
╝┘įOīó╬óė|ķ_ĻP▀BĮėĄĮ3╠¢Č╦┐┌Ż¼▓óė├pinMode ├³┴ŅīóČ╦┐┌įOų├│╔▌ö╚ļĘĮŽ“ĪŻ─Ū├┤ į┌║¾├µĄ─│╠ą“ųąŻ¼«öąĶę¬ų¬Ą└╬óė|ķ_ĻPĄ─ķ_ķ]ĀŅæBĢrŻ¼ų╗ę¬ė├ digitalRead ├³┴ŅŠ═┐╔ęį║▄ ĘĮ▒ŃĄžūx╚Ī╬óė|ķ_ĻPĄ─ųĄ┴╦Ż¼▀@éĆ├³┴ŅĄ─ė├Ę©╚ńŽ┬Ż║
int value=digitalRead(3);
╬ęéā▀@śė╩╣ė├▀@Śl├³┴ŅŻ¼Š═─▄ē“Ą├ĄĮį┌Ą┌3╠¢Č╦┐┌╔ŽĄ─ĀŅæBŻ¼╦³╩Ūę╗éĆųĄ×ķ HIGH ╗“š▀ LOW Ą─öĄūųĪŻ╚ń╣¹╬óė|ķ_ĻPĄ─ĀŅæB╩Ūķ]║ŽĄ─Ż¼╩╣ė├ digitalRead ├³┴ŅĄ├ĄĮĄ─Š═╩Ūę╗éĆ LOW; Ę┤ų«ätĄ├ĄĮHIGH ĪŻ ▀@śėŻ¼╬ęéāų╗ę¬┼ąöÓę╗Ž┬ digitalRead Ą─ĘĄ╗žųĄŠ═ų¬Ą└ķ_ĻPĄ─ ĀŅæB┴╦ĪŻį┌▀@▒ŠĢ°ųąŻ¼ė├ĄĮĄ─╦∙ėąķ_ĻPŅÉą═Ą─é„ĖąŲ„Č╝┐╔ęįė├▀@śėĄ─ĘĮĘ©ūx╚Ī╦³éāĄ─ ĀŅ æB ĪŻ
ė├Śl╝■šZŠõūīÖCŲ„╚╦Ė³ųŪ─▄
Ū░Äū╣Øšnųą╬ęéāŠÄīæĄ─│╠ą“Č╝╩Ū─ŪĘNZ║åå╬Ą─Ī░├µŚlą═Ī▒│╠ą“Ż¼ę▓Š═╩ŪŲõųąĄ─├┐éĆšZ ŠõČ╝Ģ■▒╗Ēśą“ł╠ąąĪŻČ°×ķąĪÖCŲ„╚╦ŠÄīæųŪ─▄│╠ą“ĢrŻ¼┐ŽČ©ŽŻ═¹į┌─│ĘNŚl╝■Ž┬ÖCŲ„╚╦ū÷─│ ╝■╩┬ŪķŻ¼į┌┴Ēę╗ĘNŚl╝■Ž┬ÖCŲ„╚╦╚źū÷┴Ēę╗ĘN╩┬ŪķĪŻ─Ū├┤╚ń║╬ūīÖCŲ„╚╦ū÷ĄĮ▀@ę╗³c─ž?▀@ Š═ąĶę¬ė├ĄĮC šZčįųąZ│Żė├Ą─šZŠõĪ¬Ī¬Śl╝■šZŠõ┴╦ĪŻŚl╝■šZŠõė╔ if ĻPµIūųĪóelse ĻPµIūų ║═Śl╝■▒Ē▀_╩ĮĮM│╔ĪŻ
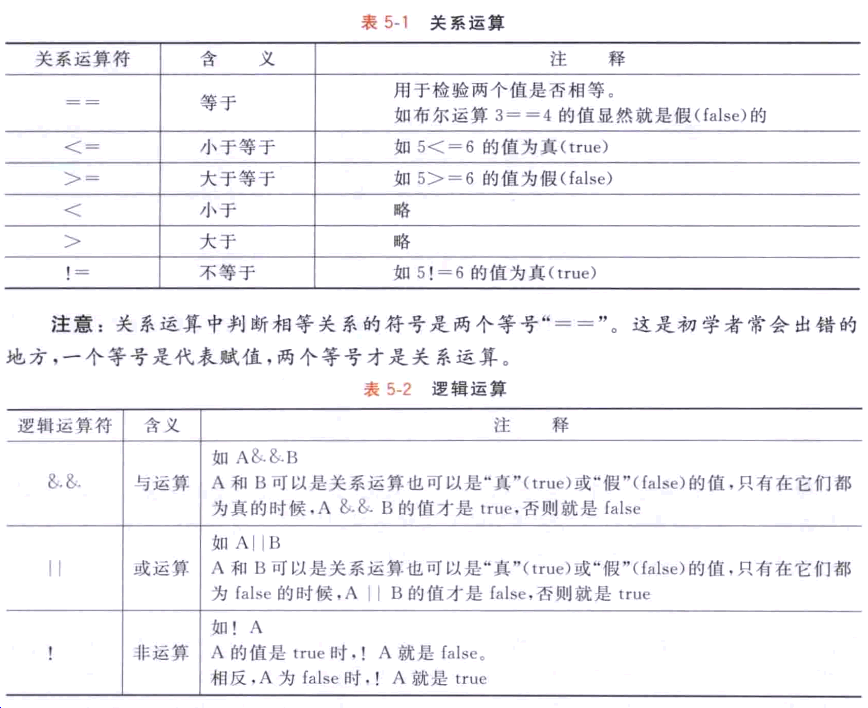
╬ęéāŽ╚üĒ┐┤┐┤╩▓├┤╩ŪŚl╝■▒Ē▀_╩ĮĪŻ║åå╬ĄžšfŻ¼Śl╝■▒Ē▀_╩Į╩Ūę╗éĆĮY╣¹ųĄų╗┐╔─▄×ķ Ī░šµĪ▒(true) ╗“Ī░╝┘Ī▒(false) Ą─ėŗ╦Ń╩ĮĪŻ╦³éā┐╔ęįĘų×ķā╔ĘNŻ║ ę╗ĘNĮąĻPŽĄ▀\╦ŃŻ╗┴Ēę╗ĘNĮą▀ē▌ŗ ▀\╦ŃĪŻĻPŽĄ▀\╦Ńų„ę¬ė├üĒ┼ąöÓųĄĄ─┤¾ąĪĻPŽĄŻ¼▒╚╚ń┼ąöÓa ║═ b ╩ŪʱŽÓĄ╚Ż¼╗“╩Ū┼ąöÓc ║═ d šl┤¾šląĪĪŻČ°╩╣ė├▀ē▌ŗ▀\╦Ń┐╔ęį░čÄūéĆĻPŽĄ▀\╦Ń▀BĮėŲüĒŻ¼▒Ē▀_Ė³Å═ļsĄ─▀ē▌ŗŻ¼▒╚╚ńŻ¼Ī░a ┤¾ė┌b, Č° Ūęc ┤¾ ė┌dĪ▒ ▀@éĆ╩Įūė╩Ūšµ▀Ć╩Ū╝┘?╬ęéā░čZ│Żė├Ą─▀@ŅÉ▀\╦Ń┐éĮYį┌▒Ē5-1║═ ▒Ē5-2ųąĪŻ
ų¬Ą└┴╦Śl╝■▒Ē▀_╩ĮĄ─ė├Ę©Ż¼īWĢ■Śl╝■šZŠõŠ═ø]ėą╚╬║╬└¦ļy┴╦ĪŻŽ┬├µ╩ŪŚl╝■šZŠõZ│Ż
ė├Ą─ÄūĘNė├Ę©ĪŻ
if (Śl╝■▒Ē▀_╩Į){ šZŠõŻ╗
}
//į┌▀@└’īæŚl╝■ØMūŃĢrł╠ąąĄ─šZŠõ
Śl╝■šZŠõZ║åå╬Ą─ė├Ę©Š═Ž±╔Ž├µ▀@śėŻ¼į┌Śl╝■▒Ē▀_╩ĮĄ─ųĄ×ķšµĢrł╠ąą┤¾└©╠¢ųąĄ─šZ ŠõŻ¼╚ń╣¹×ķ╝┘ätų▒Įė╠°▀^ł╠ąą┤¾└©╠¢║¾├µĄ─▓┐ĘųĪŻ
ūóęŌŻ║╔Ž├µĄ─ā╚╚▌ųąė├Ī░šZŠõŻ╗Ī▒┤·╠µĄ─┤¾└©╠¢ā╚Ą─▓┐Ęų╩Ū┐╔ęį░³║¼ČÓŚlšZŠõĄ─ĪŻ
if (Śl╝■▒Ē▀_╩Į){
šZŠõ1; }else{
šZŠõ2;
//į┌▀@└’īæŚl╝■ØMūŃĢrł╠ąąĄ─šZŠõ
//į┌▀@└’īæŚl╝■▓╗ØMūŃĢrł╠ąąĄ─šZŠõ
▀@ĘNė├Ę©Ž┬Ż¼╚ń╣¹Śl╝■▒Ē▀_╩ĮĄ├ĄĮØMūŃŻ¼Š═ł╠ąąšZŠõ1;ʱätł╠ąąšZŠõ2ĪŻ
if (Śl╝■▒Ē▀_╩Į1){
šZŠõ1;
else if(Śl╝■▒Ē▀_╩Į2){
šZŠõ2; }else{
šZŠõ3; //į┌▀@└’īæŚl╝■1ØMūŃĢrł╠ąąĄ─šZŠõ
//į┌▀@└’īæŚl╝■1▓╗ØMūŃĄ½Śl╝■2ØMūŃĢrł╠ąąĄ─šZŠõ //į┌▀@└’īæ╦∙ėąŚl╝■Š∙▓╗ØMūŃĢrł╠ąąĄ─šZŠõ
╔Ž├µ▀@ĘNė├Ę©ėąā╔éĆŚl╝■▒Ē▀_╩ĮŻ¼╬ęéāĄ─│╠ą“Ģ■Ž╚┼ąöÓDę╗éĆ▒Ē▀_╩Į╩ŪʱØMūŃŻ¼╚ń╣¹ Dę╗éĆŚl╝■╩Ū true Š═ł╠ąąšZŠõ1;ʱät┼ąöÓĄ┌2éĆŚl╝■Ż¼╚ń╣¹╩Ūtrue Š═ł╠ąąšZŠõ2,╩Ū false ätł╠ąąšZŠõ3ĪŻėøūĪ╚ń╣¹▀ĆėąČÓéĆŚl╝■ąĶę¬┼ąöÓŻ¼▀Ć┐╔ęįį┘╚źį÷╝ėĖ³ČÓĄ─else ifĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



