
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ūįäė╔·«aŠĆ╔ŽŻ¼▒╗čb┼õĄ─╣ż╝■│§╩╝╬╗ų├Ģr┐╠į┌▀\äėŻ¼ī┘ė┌ŁhŠ│▓╗┤_Č©Ą─ŪķørĪŻÖCŲ„╚╦▀Mąą╣ż╝■ūź╚Ī╗“čb┼õĢr╩╣ė├┴”║═╬╗ų├Ą─╗ņ║Ž┐žųŲ╩Ū▓╗┐╔ąąĄ─Ż¼Č°ę╗░Ń╩╣ė├╬╗ų├Īó┴”Ę┤ü║═ęĢėX╚┌║ŽĄ─┐žųŲüĒ▀Mąąūź╚Ī╗“čb┼õ╣żū„ĪŻ
ČÓé„ĖąŲ„ą┼Žó╚┌║Žčb┼õŽĄĮyė╔─®Č╦ł╠ąąŲ„ĪóCCDęĢėXé„ĖąŲ„║═│¼┬Ģ▓©é„ĖąŲ„Īó╚ßĒś═¾┴”é„ĖąŲ„╝░ŽÓæ¬Ą─ą┼╠¢╠Ä└Ēå╬į¬Ą╚śŗ│╔ĪŻCCDęĢėXé„ĖąŲ„░▓čbį┌─®Č╦ł╠ąąŲ„╔ŽŻ¼śŗ│╔╩ųč█ęĢėXŻ╗│¼┬Ģ▓©é„ĖąŲ„Ą─Įė╩š║═░l╦═╠ĮŅ^ę▓╣╠Č©į┌ÖCŲ„╚╦─®Č╦ł╠ąąŲ„╔ŽŻ¼ė╔ CCD ęĢėXé„ĖąŲ„ ½@╚Ī┤²ūRäe║═ūź╚Ī╬’¾wĄ─Č■ŠSłDŽ±Ż¼▓óę²ī¦│¼┬Ģ▓©é„ĖąŲ„½@╚Ī╔ŅČ╚ą┼ŽóŻ╗╚ßĒś═¾┴”é„ĖąŲ„░▓čbė┌ÖCŲ„╚╦Ą─═¾▓┐ĪŻČÓé„ĖąŲ„ą┼Žó╚┌║Žčb┼õŽĄĮyĮYśŗ╚ńłD6-29╦∙╩ŠĪŻ
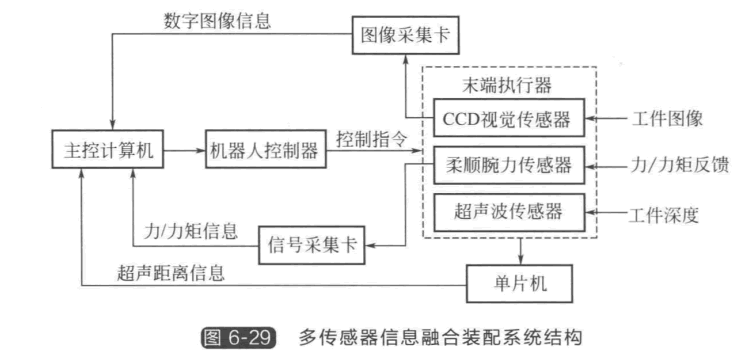
łDŽ±╠Ä└Ēų„ę¬═Ļ│╔ī”╬’¾w═Ōą╬Ą─£╩┤_├Ķ╩÷Ż¼░³└©łDŽ±▀ģŠē╠ß╚ĪĪóų▄ŠĆĖ·█ÖĪó╠žš„³c╠ß ╚ĪĪóŪ·ŠĆĘųĖŅ╝░ĘųČ╬Ųź┼õĪółDą╬├Ķ╩÷┼cūRäeĪŻ CCD ęĢėXé„ĖąŲ„½@╚ĪĄ─╬’¾włDŽ±Įø╠Ä└Ē║¾Ż╗ ┐╔╠ß╚Īī”Ž¾Ą──│ą®╠žš„Ż¼╚ń╬’¾wĄ─ą╬ą─ū°ś╦Īó├µĘeĪóŪ·┬╩Īó▀ģŠēĪóĮŪ³c╝░Č╠▌SĘĮŽ“Ą╚Ż¼Ė∙ō■ ▀@ą®╠žš„ą┼ŽóŻ¼┐╔Ą├ĄĮī”╬’¾wą╬ĀŅĄ─╗∙▒Š├Ķ╩÷ĪŻ
ė╔ė┌CCD ęĢėXé„ĖąŲ„½@╚ĪĄ─łDŽ±▓╗─▄Ę┤ė│╣ż╝■Ą─╔ŅČ╚ą┼ŽóŻ¼ę“┤╦ī”ė┌Č■ŠSłDą╬ŽÓ═¼Ż¼ āHĖ▀Č╚┬įėą▓Ņ«ÉĄ─╣ż╝■Ż¼ų╗ė├ęĢėXą┼Žó▓╗─▄š²┤_ūRäeĪŻį┌łDŽ±╠Ä└ĒĄ─╗∙ĄA╔ŽŻ¼ė╔ęĢėXą┼Žóę² ī¦│¼┬Ģ▓©é„ĖąŲ„ī”┤²£y³cĄ─╔ŅČ╚▀Mąą£y┴┐Ż¼½@╚Ī╬’¾wĄ─╔ŅČ╚(Ė▀Č╚)ą┼ŽóŻ¼╗“čž╣ż╝■Ą─┤²£y ├µęŲäėŻ¼│¼┬Ģ▓©é„ĖąŲ„▓╗öÓ▓╔╝»ŠÓļxą┼ŽóŻ¼Æ▀├ĶĄ├ĄĮŠÓļxŪ·ŠĆŻ¼Ė∙ō■ŠÓļxŪ·ŠĆĘų╬÷│÷╣ż╝■Ą─ ▀ģŠē╗“═Ōą╬ĪŻėŗ╦ŃÖCīóęĢėXą┼Žó║═╔ŅČ╚ą┼Žó╚┌║Ž═ŲöÓ║¾Ż¼▀MąąłDŽ±Ųź┼õĪóūRäeŻ¼▓ó┐žųŲÖCąĄ ╩ųęį║Ž▀mĄ─╬╗ū╦£╩┤_Ąžūź╚Ī╬’¾wĪŻ
░▓čbį┌ÖCŲ„╚╦─®Č╦ł╠ąąŲ„╔ŽĄ─│¼┬Ģ▓©é„ĖąŲ„ė╔░l╔õ║═Įė╩š╠ĮŅ^śŗ│╔Ż¼Ė∙ō■┬Ģ▓©Ę┤╔õĄ─įŁ└ĒŻ¼Öz£yė╔┤²£y³cĘ┤╔õ╗žĄ─┬Ģ▓©ą┼╠¢Ż¼Įø╠Ä└Ē║¾Ą├ĄĮ╣ż╝■Ą─╔ŅČ╚ą┼ŽóĪŻ×ķ┴╦╠ßĖ▀Öz£yŠ½Č╚Ż¼ į┌Įė╩šå╬į¬ļŖ┬ĘųąŻ¼▓╔ė├┐╔ūāķōųĄÖz£yĪóĘÕųĄÖz£yĪó£žČ╚čaāö║═ŽÓ╬╗čaāöĄ╚╝╝ągŻ¼┐╔½@Ą├▌^ Ė▀ Ą─ Öz £y Š½ Č╚ ĪŻ
═¾┴”é„ĖąŲ„£yįć─®Č╦ł╠ąąŲ„╦∙╩▄┴”/┴”ŠžĄ─┤¾ąĪ║═ĘĮŽ“Ż¼Å─Č°┤_Č©─®Č╦ł╠ąąŲ„Ą─▀\äėĘĮŽ“ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


