
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
╣żū„šŠĄ─įOėŗ╩Ūę╗ĒŚ▌^×ķņ`╗ŅČÓūāĪóĻP┬ōę“╦ž╔§ČÓĄ─╝╝ąg╣żū„Ż¼ŲõųąŠ▀ėą╣▓ąįĄ─ę╗░ŃįO ėŗįŁätėąŻ║įOėŗŪ░ąĶę¬│õĘųĘų╬÷ū„śIī”Ž¾Ż¼öMČ©Z║Ž└ĒĄ─ū„śI╣ż╦ćŻ╗ąĶę¬ØMūŃū„śIĄ─╣”─▄ę¬ Ū¾║═ŁhŠ│Śl╝■Ż╗ąĶę¬ØMūŃ╔·«a╣Ø┼─ę¬Ū¾Ż╗š¹¾w╝░Ė„ĮM│╔▓┐ĘųąĶę¬╚½▓┐ØMūŃ░▓╚½ęÄĘČ╝░ś╦£╩Ż╗ Ė„įOéõ╝░┐žųŲŽĄĮy權▀ėą╣╩šŽ’@╩Š╝░ł¾Š»čbų├Ż╗▒Ńė┌ŠSūoą▐└ĒŻ╗▓┘ū„ŽĄĮyæ¬║åå╬├„┴╦Ż¼▒Ńė┌ ▓┘ū„║═╚╦╣żĖ╔ŅAŻ╗▓┘ū„ŽĄĮy▒Ńė┌┬ōŠW┐žųŲŻ╗╣żū„šŠ▒Ńė┌ĮMŠĆŻ╗ĮøØ·īŹ╗▌Ż¼┐ņ╦┘═Č«aĄ╚10ĒŚĪŻ ▀@10ĒŚįOėŗįŁät¾w¼F┴╦╣żū„šŠė├æ¶Ą─ČÓĘĮ├µąĶ꬯¼║åå╬ĄžšfŠ═╩ŪŪ¦ĘĮ░┘ėŗĄžØMūŃė├æ¶Ą─ę¬ Ū¾ĪŻŽ▐ė┌Ų¬Ę∙Ż¼Ž┬├µų╗ī”Ė³Š▀╠ž╩ŌąįĄ─ÄūĒŚįŁätš╣ķ_ėæšōĪŻ
(1)╣żū„šŠĄ─╣”─▄ę¬Ū¾║═ŁhŠ│Śl╝■
ÖCŲ„╚╦╣żū„šŠĄ─╔·«aū„śI╩Ūė╔ÖCŲ„╚╦▀B═¼╦³Ą──®Č╦ł╠ąąŲ„ĪóŖAŠ▀║═ūā╬╗ÖCęį╝░Ųõ╦¹ų▄▀ģ įOéõĄ╚Š▀¾w═Ļ│╔Ą─Ż¼ŲõųąŲų„ī¦ū„ė├Ą─╩ŪÖCŲ„╚╦Ż¼╦∙ęį▀@ę╗įOėŗįŁätŽ╚į┌▀xō±ÖCŲ„╚╦Ģr▒ž ĒÜØMūŃĪŻØMūŃū„śIĄ─╣”─▄ę¬Ū¾Ż¼Š▀¾wĄĮ▀xō±ÖCŲ„╚╦ĢrŻ¼┐╔Å─╚²ĘĮ├µ╝ėęį▒ŻūCŻ║ėąūŃē“Ą─│ųųž ─▄┴”Ż¼ėąūŃē“┤¾Ą─╣żū„┐šķg║═ėąūŃē“ČÓĄ─ūįė╔Č╚ĪŻØMūŃŁhŠ│Śl╝■┐╔ė╔ÖCŲ„╚╦«aŲĘśė▒ŠĄ─═Ų╦] ╩╣ė├ŅIė“╝ėęį┤_Č©ĪŻŽ┬├µĘųäe╝ėęįėæšōĪŻ
ó┘┤_Č©ÖCŲ„╚╦Ą─│ųųž─▄┴”ĪŻÖCŲ„╚╦╩ų═¾╦∙─▄ūź╚ĪĄ─┘|┴┐╩ŪÖCŲ„╚╦ę╗éĆųžę¬ąį─▄ųĖś╦Ż¼ ┴ĢæT╔ŽĘQ×ķÖCŲ„╚╦Ą─┐╔░ß┘|┴┐Ż¼▀@ę╗┐╔░ß┘|┴┐Ą─ū„ė├ŠĆ┤╣ų▒ė┌Ąž├µ(ÖCŲ„╚╦╗∙£╩├µ)▓ó═©▀^ ÖCŲ„╚╦═¾³cP ĪŻ ę╗░ŃšfüĒŻ¼═¼ę╗ŽĄ┴ąĄ─ÖCŲ„╚╦Ż¼Ųõ┐╔░ß┘|┴┐įĮ┤¾Ż¼╦³Ą─═Ōą╬│▀┤ńĪó╩ų═¾╗∙³c (P) Ą─╣żū„┐šķgĪóūį╔Ē┘|┴┐ęį╝░╦∙Ž¹║─Ą─╣”┬╩ę▓Š═įĮ┤¾ĪŻ
į┌įOėŗųąŻ¼ąĶę¬│§▓ĮįOėŗ│÷ÖCŲ„╚╦Ą──®Č╦ł╠ąąŲ„Ż¼▒╚▌^£╩┤_Ąžėŗ╦Ń╦³Ą─┘|┴┐Ż¼░┤ššŽ┬╩Į │§▓Į┤_Č©ÖCŲ„╚╦Ą─┐╔░ß┘|┴┐RGĪŻ
RG=(MG+GG+QG)K1
╩Įųą MGĪ¬Ī¬─®Č╦ł╠ąąŲ„ų„¾wĮYśŗ┘|┴┐Ż╗
GGĪ¬Ī¬Z┤¾╣ż╝■Ą─┘|┴┐Ż╗
QGĪ¬Ī¬─®Č╦ł╠ąąŲ„ĖĮ╝■┘|┴┐Ż╗
K₁Ī¬Ī¬░▓╚½ŽĄöĄŻ¼ K₁=1.0Ī½1.1ĪŻ
į┌─│ą®ł÷║ŽŻ¼─®Č╦ł╠ąąŲ„▒╚▌^Å═ļsŻ¼ĮYśŗ²ŗ┤¾Ż¼└²╚ńę╗ą®čb┼õ╣żū„šŠ║═░ß▀\╣żū„šŠųąĄ─ ─®Č╦ł╠ąąŲ„ĪŻę“┤╦Ż¼ī”ė┌╦³Ą─įOėŗĘĮ░Ė║═ĮYśŗą╬╩ĮŻ¼æ¬«öĘ┤Å═蹊┐Ż¼┤_Č©│÷▌^×ķ║Ž└Ē┐╔ąąĄ─ ĮYśŗŻ¼£pąĪŲõ┘|┴┐ĪŻ╚ń╣¹─®Č╦ł╠ąąŲ„▀Ćę¬ūź╚Ī╗“░ß▀\╣ż╝■Ż¼Š═ę¬░┤Z┤¾╣ż╝■Ą─┘|┴┐GG ▀Mąą ėŗ ╦Ń Ż╗QG ╩Ū│²─®Č╦ł╠ąąŲ„Ą─ų„¾wĮYśŗ═ŌŻ¼Ųõ╦¹ĖĮ╝■┘|┴┐Ą─┐é║═Ż¼▒╚╚ńÜŌäė╣▄ĮėŅ^ĪóÜŌ╣▄Īó ÜŌäėķyĪóļŖÜŌį¬Ų„╝■Ż¼ī¦ŠĆ║═ŠĆŖAĄ╚Ż╗ K1 ╩Ū ░▓ ╚½ ŽĄ öĄ Ż¼ «öMG ĪóGG ║═ QG3 ĒŚ ų« ║═ ┼c ÖC Ų„ ╚╦ūį░ß┘|┴┐Ą─ś╦£╩ųĄėą ę╗ Č©ėÓ┴┐ĢrŻ¼┐╔ęį▓╗┐╝æ]K₁, ┤╦ Ģr Ż¼K1 ┐╔ ╚Ī 1 ; «ö ╔Ž ╩÷ 3 ĒŚ ų« ║═ ┼c ─│ ę╗ ś╦£╩ųĄĘŪ│ŻĮėĮ³ĢrŻ¼╚Ī K₁>1, ═©│ŻŪķørŽ┬Ż¼─®Č╦ł╠ąąŲ„Ą─┘|┴┐įĮ┤¾Ż¼ÖCŲ„╚╦╩ų═¾╗∙ ³cĄ─äėū„ĘČć·įĮ┤¾Ż¼ęį╝░ÖCŲ„╚╦Ą─▀\ąą╦┘Č╚įĮĖ▀Ż¼ K₁ Ą─╚ĪųĄŠ═įĮ┤¾Ż¼Ę┤ų«Ż¼┐╔╚ĪąĪųĄĪŻ
┴Ē═ŌŻ¼─®Č╦ł╠ąąŲ„ųžą─Ą─╬╗ų├ī”ÖCŲ„╚╦Ą─┐╔░ß┘|┴┐╩Ūėąė░ĒæĄ─ĪŻ═¼ ę╗ ┘|┴┐Ą──®Č╦ł╠ąą Ų„Ż¼Ųõųžą─╬╗ų├Ų½ļx╩ų═¾ųąą─ (P) įĮ▀hŻ¼ī”įōųąą─ą╬│╔Ą─ÅØŠžę▓Š═įĮ┤¾Ż¼╦∙▀xō±Ą─ÖCŲ„╚╦ ┐╔░ß┘|┴┐Š═ę¬Ė³┤¾ ę╗ ą®ĪŻ
┘|┴┐ģóöĄ╩Ū▀xō±ÖCŲ„╚╦Z╗∙▒ŠĄ─ģóöĄŻ¼øQ▓╗į╩įSÖCŲ„╚╦│¼žō║╔▀\ąąĪŻ└²╚ń╩╣ė├┐╔░ß┘|┴┐ ×ķ 6 0kg Ą─ÖCŲ„╚╦öyĦ┐éųž×ķ65kg Ą──®Č╦ł╠ąąŲ„╝░žō▌dķLĢrķg▀\▐DŻ¼▒žČ©Ģ■┤¾┤¾ĮĄĄ═ÖCŲ„ ╚╦Ą─ųžÅ═Č©╬╗Š½Č╚Ż¼ė░Ēæ╣żū„┘|┴┐Ż¼╔§ų┴ōpē─ÖCąĄ┴Ń╝■Ż¼╗“ę“▀^▌dČ°ōpē─ÖCŲ„╚╦┐žųŲŽĄĮyĪŻ
ó┌┤_Č©ÖCŲ„╚╦Ą─╣żū„┐šķgĪŻÖCŲ„╚╦Ą─╩ų═¾╗∙³cP Ą─äėū„ĘČć·Š═╩ŪÖCŲ„╚╦Ą─├¹┴x╣żū„┐š ķgŻ¼╦³╩ŪÖCŲ„╚╦Ą─┴Ē ę╗ éĆųžę¬ąį─▄ųĖś╦ĪŻį┌įOėŗųąŻ¼Ž╚Ė∙ō■┘|┴┐┤¾ąĪ║═ū„śIę¬Ū¾Ż¼│§▓ĮįO ėŗ╗“▀xė├─®Č╦ł╠ąąŲ„Ż¼╚╗║¾═©▀^ū„łDšę│÷ū„śIĘČć·Ż¼ų╗ėąū„śIĘČć·═Ļ╚½┬õį┌╦∙▀xÖCŲ„╚╦Ą─P ³c╣żū„┐šķgų«ā╚Ż¼įōÖCŲ„╚╦▓┼─▄ØMūŃū„śIĄ─ĘČć·ę¬Ū¾ĪŻĘ±ätŠ═ę¬Ė³ōQÖCŲ„╚╦ą═╠¢Ż¼ų▒ĄĮØMūŃ ū„śIĘČć·ę¬Ū¾×ķų╣ĪŻ
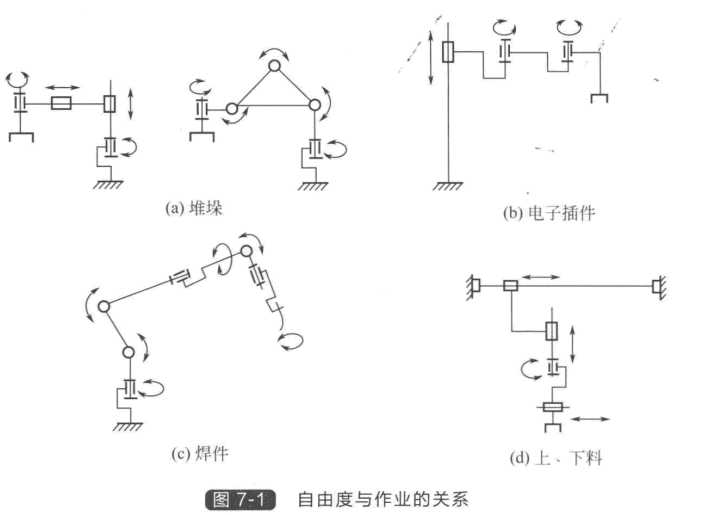
ó█┤_Č©ÖCŲ„╚╦Ą─ūįė╔Č╚ĪŻÖCŲ„╚╦į┌│ųųž║═╣żū„┐šķg╔ŽØMūŃī”ÖCŲ„╚╦╣żū„šŠ╗“╔·«aŠĆĄ─ ╣”─▄ę¬Ū¾ų«║¾Ż¼▀Ćę¬Ęų╬÷╦³╩Ūʱ┐╔ęįį┌ū„śIĘČć·ā╚ØMūŃū„śIĄ─ū╦æBę¬Ū¾ĪŻ╚ńłD7 - 1(a) ╦∙ ╩Š Ą─║åå╬ČčČŌū„śIŻ¼ū„×ķ─®Č╦ł╠ąąŲ„Ą─ŖAū”Ż¼ų╗ąĶ└@┤╣ų▒▌SĄ─1éĆą²▐Dūįė╔Č╚Ż¼į┘╝ė╔ŽÖCŲ„╚╦ ▒Š¾wĄ─3éĆłAų∙ū°ś╦ūįė╔Č╚Ż¼4éĆūįė╔Č╚Ą─łAų∙ū°ś╦ÖCŲ„╚╦╝┤┐╔ØMūŃę¬Ū¾ĪŻ╚¶ė├┤╣ų▒ĻP╣Øą═ ÖCŲ„╚╦Ż¼ė╔ė┌╔Ž▒█│ŻŽ“Ž┬āAą▒Ż¼ėųąĶ╩ų═¾ö[äėĄ─ūįė╔Č╚Ż¼╣╩ąĶ5éĆūįė╔Č╚Ą─┤╣ų▒ĻP╣Øą═ÖCŲ„ ╚╦ĪŻłD7 - 1(b) ▒Ē╩ŠļŖūė▓Õ╝■ū„śIŻ¼│Ż╩╣ė├4éĆūįė╔Č╚╦«ŲĮĻP╣ØĄ─SCARA ÖCŲ„╚╦ĪŻ×ķ┴╦║Ė ĮėÅ═ļs╣ż╝■Ż¼ ę╗ ░ŃąĶę¬6éĆūįė╔Č╚ĪŻ╚ń╣¹║Ė¾w║åå╬Ż¼ėų╩╣ė├ūā╬╗ÖCŻ¼į┌║▄ČÓŪķørŽ┬5éĆūįė╔ ĻP╣ØÖCŲ„╚╦╝┤┐╔ØMūŃę¬Ū¾ĪŻūįė╔Č╚įĮČÓŻ¼ÖCŲ„╚╦Ą─ÖCąĄĮYśŗ┼c┐žųŲŠ═įĮÅ═ļsŻ¼╦∙ęįį┌═©│ŻŪķ ørŽ┬Ż¼╚ń╣¹╔┘ūįė╔Č╚─▄═Ļ│╔Ą─ū„śIŻ¼Š═▓╗ę¬├ż─┐▀xė├Ė³ČÓūįė╔Č╚Ą─ÖCŲ„╚╦╚ź═Ļ│╔ĪŻ
┐éų«Ż¼į┌▀xō±ÖCŲ„╚╦ĢrŻ¼×ķ┴╦ØMūŃ╣”─▄ę¬Ū¾Ż¼ąĶę¬Å─│ųųžĪó╣żū„┐šķgĪóūįė╔Č╚Ą╚ĘĮ├µüĒ Ęų╬÷Ż¼ų╗ėą╦³éā═¼Ģr▒╗ØMūŃ╗“š▀į÷╝ė▌oų·čbų├║¾╝┤─▄ØMūŃ╣”─▄ę¬Ū¾Ą─Śl╝■Ż¼╦∙▀xė├Ą─ÖCŲ„╚╦ ▓┼╩Ū┐╔ė├Ą─ĪŻ
ÖCŲ„╚╦Ą─▀xė├ę▓│Ż╩▄ÖCŲ„╚╦╩ął÷╣®æ¬ę“╦žĄ─ė░ĒæŻ¼╦∙ęįŻ¼▀ĆąĶ┐╝æ]╩ął÷ārĖ±Ż¼ų╗ėą─Ūą® ┐╔ė├Č°ŪęārĖ±Ą═┴«Īóąį─▄┐╔┐┐Ż¼Ūęėą▌^║├Ą─╩█║¾Ę■䚯¼▓┼╩ŪZæ¬įōā׎╚▀xė├Ą─ĪŻ
─┐Ū░Ż¼ÖCŲ„╚╦į┌įSČÓ╔·«aŅIė“└’Ą├ĄĮ┴╦ÅVĘ║æ¬ė├Ż¼╚ńčb┼õĪó║ĖĮėĪóćŖ═┐║═░ß▀\┤aČŌĄ╚ĪŻ Ė„ĘNæ¬ė├ŅIė“▒ž╚╗Ģ■ėąĖ„ūį▓╗═¼Ą─ŁhŠ│Śl╝■Ż¼×ķ┤╦Ż¼ÖCŲ„╚╦ųŲįņÅS╝ęĖ∙ō■▓╗═¼Ą─æ¬ė├ŁhŠ│║═ ū„śI╠ž³cŻ¼▓╗öÓĄžčąŠ┐Īóķ_░l║═╔·«a│÷┴╦Ė„ĘNŅÉą═Ą─ÖCŲ„╚╦╣®ė├æ¶▀xė├ĪŻĖ„╔·«aÅS╝ęČ╝ī”ūį ╝║Ą─«aŲĘĮo│÷┴╦Z║Ž▀mĄ─æ¬ė├ŅIė“Ż¼╦¹éā▓╗╣Ō┐╝æ]┴╦╣”─▄ę¬Ū¾Ż¼▀Ć┐╝æ]┴╦Ųõ╦¹æ¬ė├ųąĄ─å¢ Ņ}Ż¼╚ńÅŖČ╚äéČ╚Īó▄ē█EŠ½Č╚ĪóĘ█ēm╝░£žØ±Č╚Ą╚╠ž╩Ōę¬Ū¾ĪŻį┌įOėŗ╣żū„šŠ▀xė├ÖCŲ„╚╦ĢrŻ¼æ¬ Ž╚ģó┐╝╔·«aÅS╝ę╠ß╣®Ą─«aŲĘšf├„ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


